Raspberry Pi Pico 開発環境構築
2021.02.09

YouTube でも紹介しています。画像をクリックすると再生できます。
Raspberry Pi Picoは、Raspberry Pi財団が独自に開発したARM Cortex M0+デュアルコアのRP2040マイコンを搭載した開発基板です。C/C++およびMicroPythonで開発が可能です。
既存のRaspberry Piとは異なりLinux OSは搭載できません。
C/C++ SDK、もしくは公式に提供されているMicroPythonインタプリタを使って開発が可能です。
MicroPythonはPython 3ベースの組み込み用プログラミング言語です。USBをPCに接続すると表示されるドライブ(マスストレージ)にドラッグアンドドロップすることでプログラムを書き込むことができます。
開発環境構築では、C/C++のビルド環境を整備します。
■特徴
・Raspberry Pi(UK)設計のRP2040マイコン搭載
・デュアルコア ARM Cortex M0+プロセッサ、最大動作周波数 133 MHz
・SRAM:264KB、フラッシュメモリ:2MB
・端面スルーホールを備えているため直接キャリアボードへのはんだづけが可能
・USB 1.1 ホスト/デバイス両対応
・低消費電力スリープモードおよびドーマントモードが利用可能
・USBを介しマスストレージを使ったドラッグアンドドロップによるプログラムの書き込みが可能
・26 x 多機能GPIOピン
・2 x SPI、2 x I2C、2 x UART、3 x 12 bit ADC、16 x PWMチャンネル
・正確なクロックとタイマーを搭載
・温度センサ搭載
・高速な浮動小数点ライブラリを搭載
・8 x プログラマブルI/O(PIO)
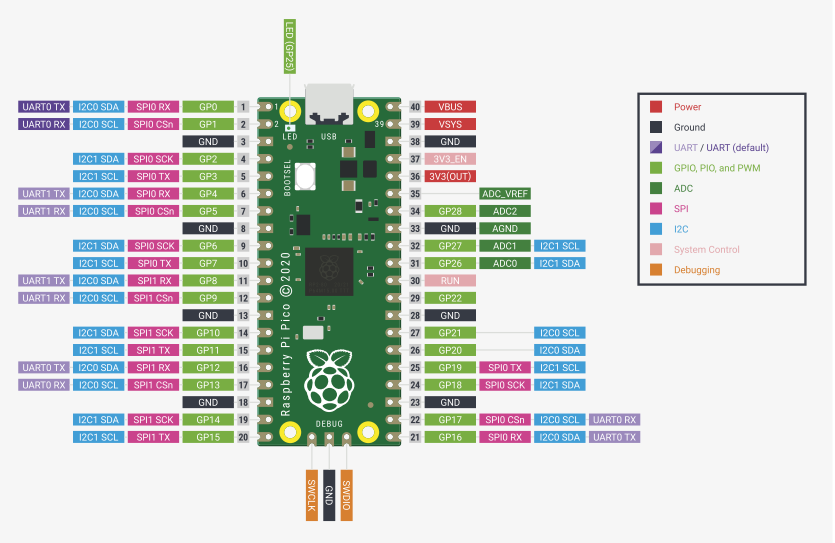
■PinOut
■開発環境
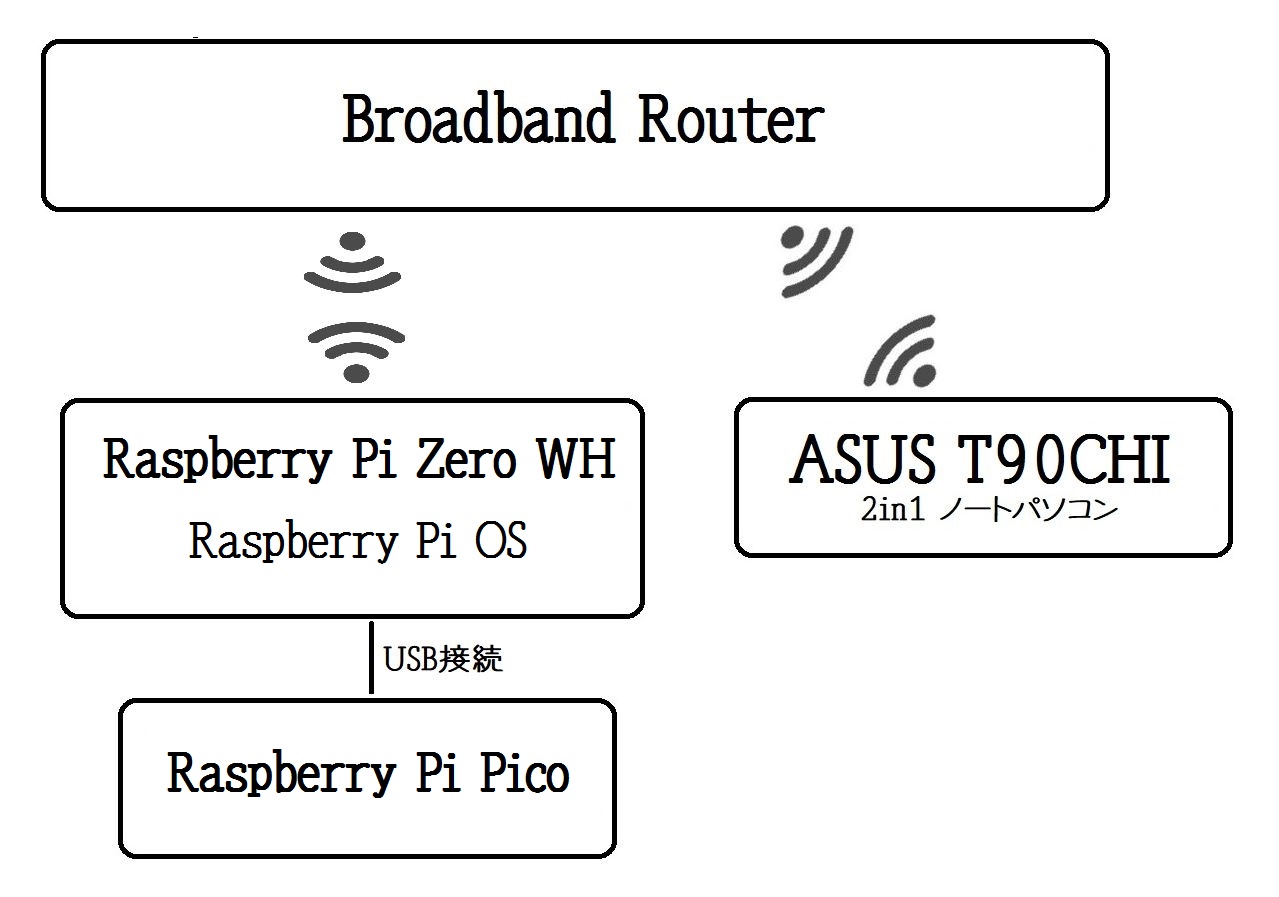
Zero へは Wifi経由で、TeraTermによりSSH接続しています。
■Quick Pico Setup ※使いません
$ wget https://raw.githubusercontent.com/raspberrypi/pico-setup/master/pico_setup.sh
$ ./pico_setup.sh
$ sudo reboot
pico_setup.sh スクリプトを実行すると、環境が整います。
■Pico Manual Setup
Quick Setup では Visual Studio Code など余計なものがインストールされてしまいます。
当方はコマンドラインでの開発が好きなので、セットアップ用スクリプトは使用せずに環境を整えていきます。
SDK(ソフトウェア開発キット)の取得
ホームディレクトリーに、pico ディレクトリーを作成します。
$ mkdir ~/pico
pico ディレクトリーに移動して、SDKをコピーします。
$ cd ~/pico
$ git clone -b master https://github.com/raspberrypi/pico-sdk.git
pico-sdk ディレクトリーができるので、そこに移動して、サブモジュールをアップデートします。
$ cd pico-sdk
$ git submodule update --init
pico ディレクトリーに戻って、サンプルプログラムをコピーします。
$ cd ..
$ git clone -b master https://github.com/raspberrypi/pico-examples.git
pico-examplesディレクトリーが作られ、その中にサンプルプログラムのサブディレクトリーができます。
$ ls pico-examples
CMakeLists.txt flash pwm
LICENSE.TXT gpio reset
README.md hello_world rtc
adc i2c spi
blink ide system
clocks interp timer
cmake multicore uart
divider pico_sdk_import.cmake usb
dma picoboard watchdog
example_auto_set_url.cmake pio
Toolchain(プログラミングツール) のインストール
パッケージリストを更新します。
$ sudo apt update
コンパイラーなどの、Toolchainをインストールします。
$ sudo apt install cmake gcc-arm-none-eabi libnewlib-arm-none-eabi build-essential
環境変数の設定
$ vi ~/.bashrc
export PICO_SDK_PATH=~/pico/pico-sdk
$ source ~/.bashrc
■サンプルコードのビルド
オンボードLEDを点滅させるサンプルコードをビルドしてみます。
Ref.raspberrypi/pico-examples
pico-examplesディレクトリーの中に、blink というディレクトリーがあります。
ここには、picoのオンボードLEDを点滅させるサンプルコードがはいっています。
pico-examplesディレクトリーに移動して、blinkディレクトリーを、ホームの下にある、picoディレクトリーにコピーします。
$ cd ~/pico/pico-examples
$ cp -r blink ~/pico
コピーしたblinkディレクトリーに移動して、pico-sdkのexternalディレクトリーにある、pico_sdk_import.cmake ファイルをここにコピーします。
$ cd ~/pico/blink
$ cp -p ~/pico/pico-sdk/external/pico_sdk_import.cmake .
blink ディレクトリーには3つのファイルがあることがわかります。
$ ls
CMakeLists.txt blink.c pico_sdk_import.cmake
サンプルコードをちょっと覗いてみると、雰囲気的になにをやっているのか、大体創造できると思います。
$ vi blink.c
#include "pico/stdlib.h"
int main() {
const uint LED_PIN = 25;
gpio_init(LED_PIN);
gpio_set_dir(LED_PIN, GPIO_OUT);
while (true) {
gpio_put(LED_PIN, 1);
sleep_ms(50);
gpio_out(LED_PIN, 0);
sleep_ms(250);
}
}
まずは、ソースディレクトリーを汚さないように、サブディレクトリーを作成します。
$ mkdir build
buildディレクトリーに移動して、cmake します。
$ cd build
$ cmake ..
-- Configuring incomplete, errors occurred!
See also "/home/pi/pico/blink/build/CMakeFiles/CMakeOutput.log".
そうすると、早速エラーを吐いてしまいました。
そんなときは、CMakeLists.txt にこんな感じ↓で追記してみてください。
$ vi ../CMakeLists.txt
cmake_minimum_required(VERSION 3.12)
include(pico_sdk_import.cmake)
project(blink)
pico_sdk_init()
add_executable(blink
blink.c
)
pico_add_extra_outputs(blink)
target_link_libraries(blink pico_stdlib)
まずは、先ほどのcmakeでできたbuildディレクトリーの中のごみを削除します。
$ rm -r *
cmake、続いて、make します。
$ cmake ..
$ make
$ ls
CMakeCache.txt blink.elf elf2uf2
CMakeFiles blink.elf.map generated
Makefile blink.hex pico-sdk
blink.bin blink.uf2
blink.dis cmake_install.cmake
makeすると、次の2つのファイルが生成されます。
blink.elf : デバッグ用に使われます
blink.uf2 : マイコン書き込み用ファイル
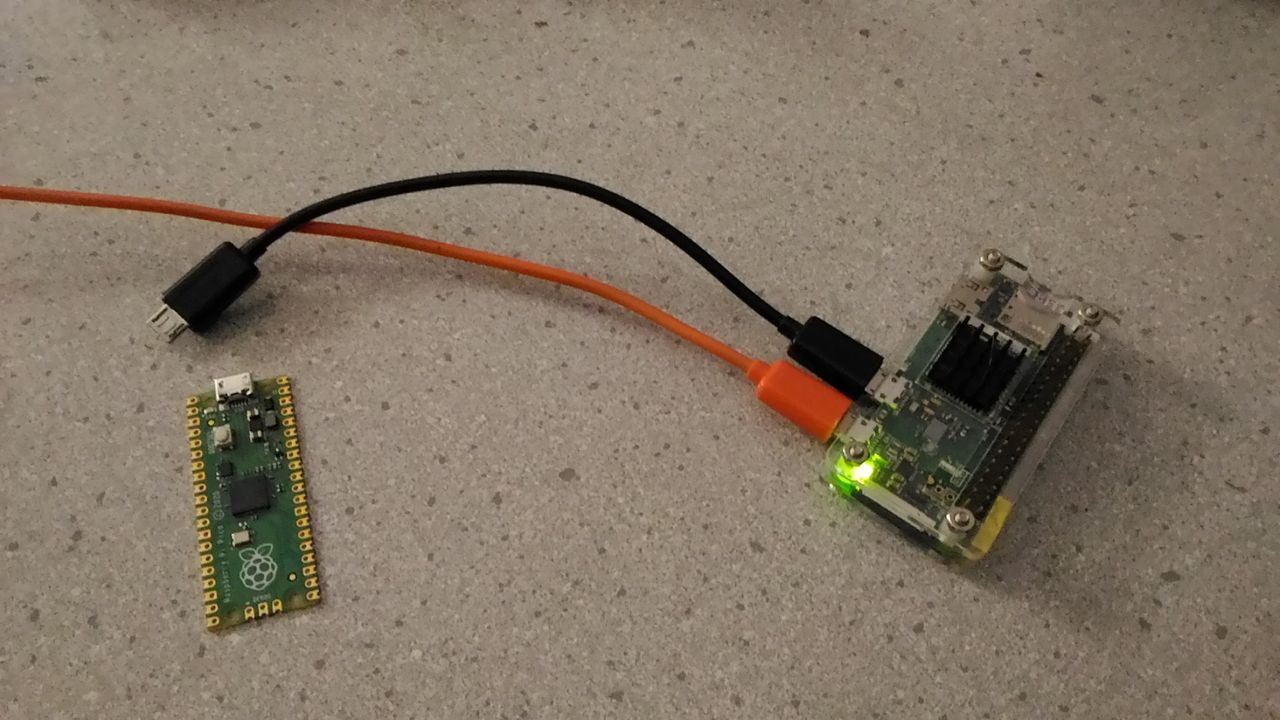
BOOTSELボタンを押しながら、Raspberry PiにUSBケーブルを挿すのは難しいので、まずはRaspberry PiにUSBケーブルを繋げます。
PicoのBOOTSELを押しながら、USBケーブルをPicoに挿します。
すると、なんとRaspberry Piがリブートされてしまいます。
TeraTermとの接続が切れるので再度ログインします。
Raspberry Pi Zeroが再起動してしまう要因ですが、PicoをUSB接続した際の突入電流により、
ZeroWHの5V系電源が4.7V以下になり低電圧検出リセットが動作してしまったようです。
Raspberry Piの仕様に明記されていませんが -5%(4.75V)が限界のようです。
Ref. Zero WHにUSBハブを挿すと再起動されてしまいます
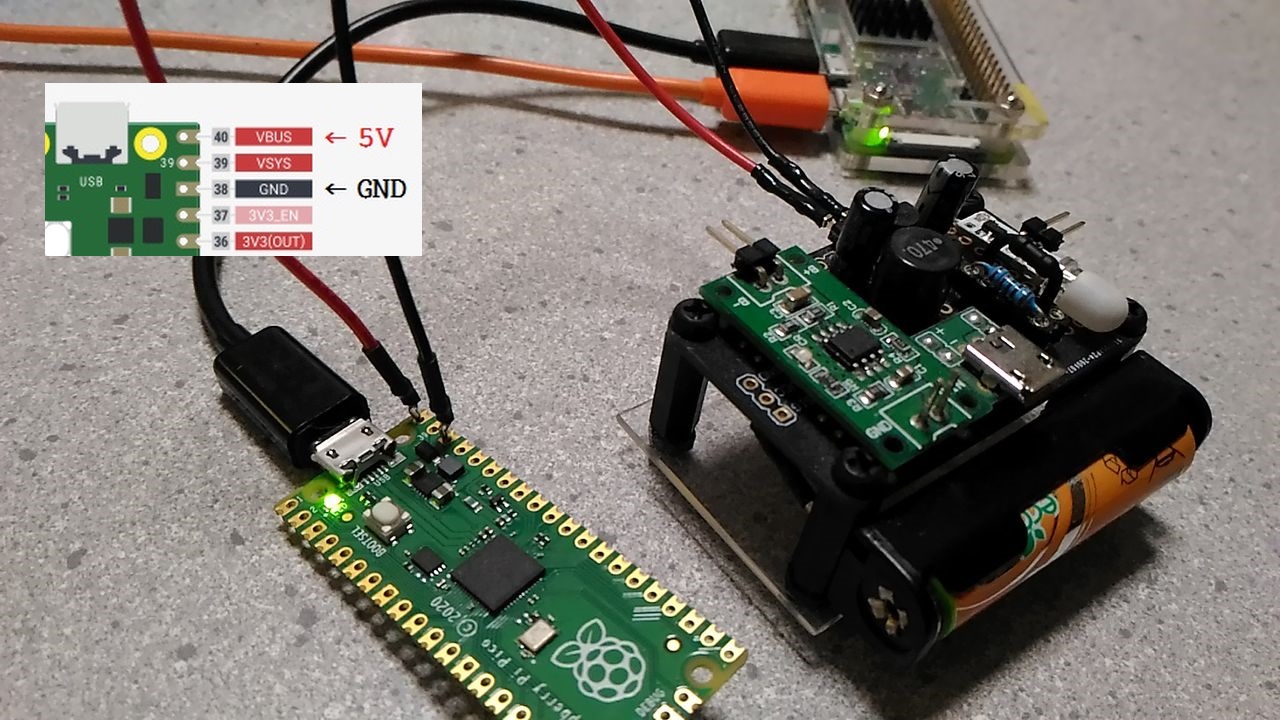
これは単に、Picoをラズパイに挿したときにもリブートしてしまいますが、
PicoのVBUSに5V給電して稼働している状態でラズパイに挿した場合は、リブートは発生しません。
ただし、VBUS給電では、PicoがUSBホストになってしまい、ラズパイにmountすることはできません。
リブートはしてしまうものの、ラズパイが起動後には、Picoがデバイスとして認識されます。
$ sudo fdisk -l
....
Device Boot Start End Sectors Size Id Type
/dev/sda1 1 262143 262143 128M e W95 FAT16 (LBA)
$ sudo mkdir -p /mnt/pico
$ sudo mount /dev/sda1 /mnt/pico
$ ls /mnt/pico/
INDEX.HTM INFO_UF2.TXT
mountすると、すでにpicoの中に2つのファイルが存在しますが、これはこのままで構いません。
$ sudo cp blink.uf2 /mnt/pico
uf2ファイルをコピーした瞬間にプログラムが実行されます。
また、自動的に umount され、Picoとの接続が切られます。
一応、作法として明示的に umount しましょう。
$ sudo umount /mnt/pico
■プログラムの書き換え
Raspberry Piに、PicoをBOOTSELを押しながら接続すると、プログラムが消去されます。
あとは再起動後に、再度マウントして、新たにプログラムを書き込みます。
■Picoの実行
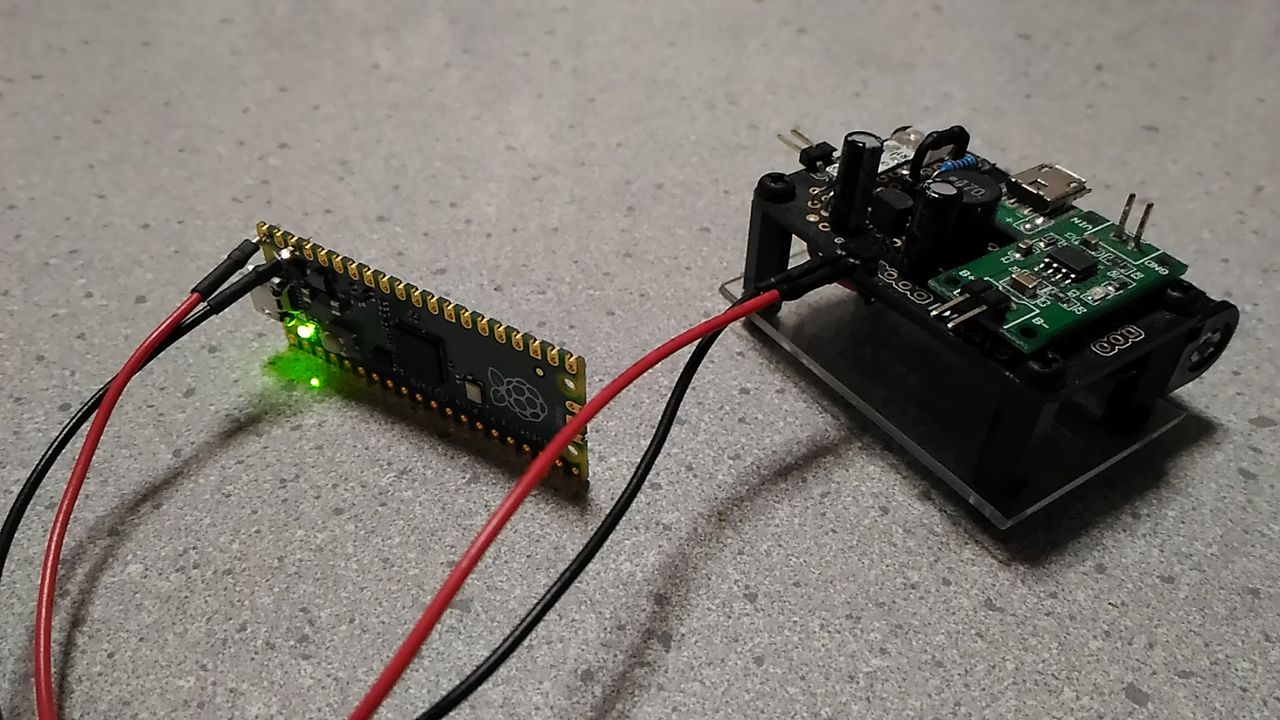
Picoは、ラズパイからUSB給電を受けて、動作することもできますが、
先ほど触れたように、VBUSからの5V給電で実行することが可能です。
さらに、PicoのmicroUSBを使用しない場合には、VSYSからの給電(3.5~5.5V)も可能です。
■追記
今回は、BOOTSELボタンを押した際にリブートされてしまいましたが、Raspberry Pi 3 model B では問題なくマウントできます。
とは言え、これでは不便なので、後日突入電流対策をしたいと思います。
■参考文献
・Raspberry Pi Picoスタートガイド
・How to blink an LED with Raspberry Pi Pico in C
・Raspberry Pi Picoの仕様書を読んでみる
・RP2040マイコン用C/C++開発環境(ライブラリ、ツール)
|












