ドローン制御 まずはロボットカーでお勉強
2022.05.27
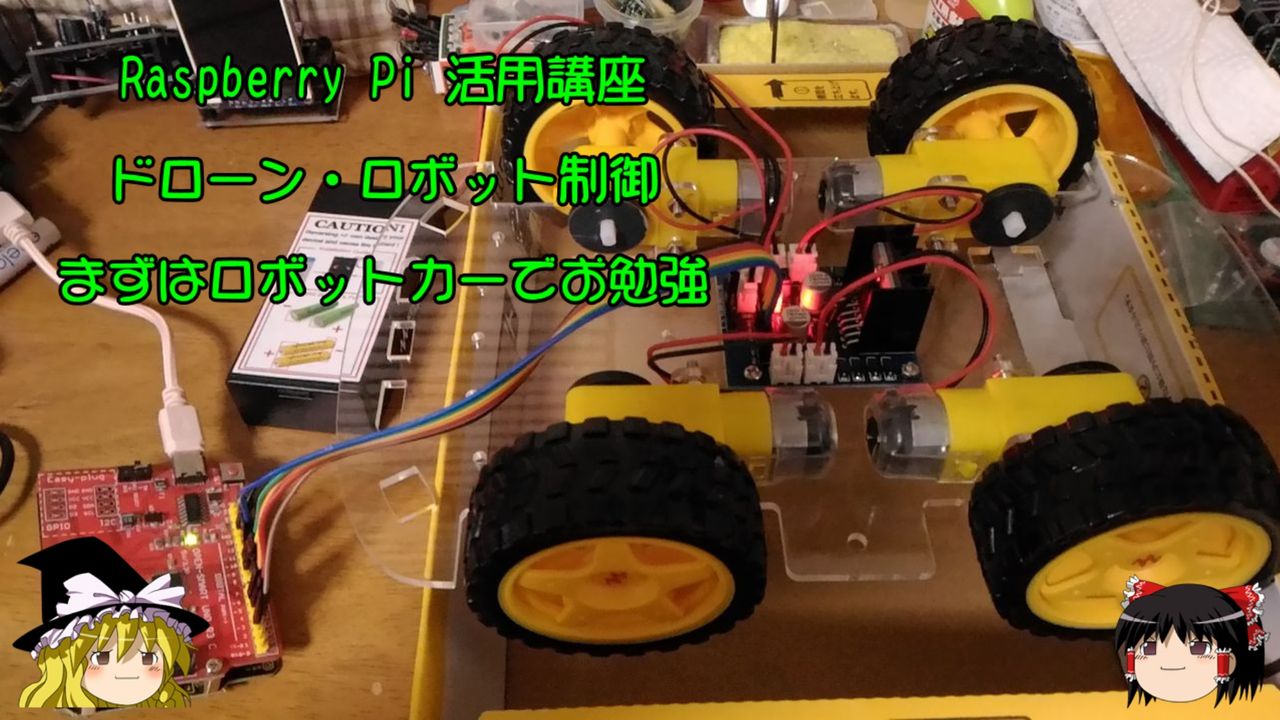
YouTube でも紹介しています。画像をクリックすると再生できます。
新たにドローン制御のカテゴリーを作りました。
今回はロボット制御の基本、モータードライバを制御して四輪駆動車を動かします。
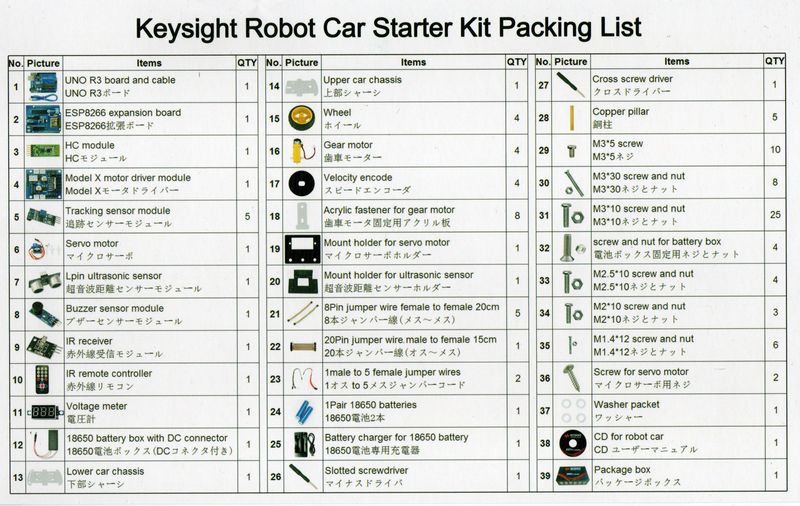
OSOYOO オープンソース ロボットカー スターターキット V1

Ref.OSOYOO オープンソース ロボットカー V1
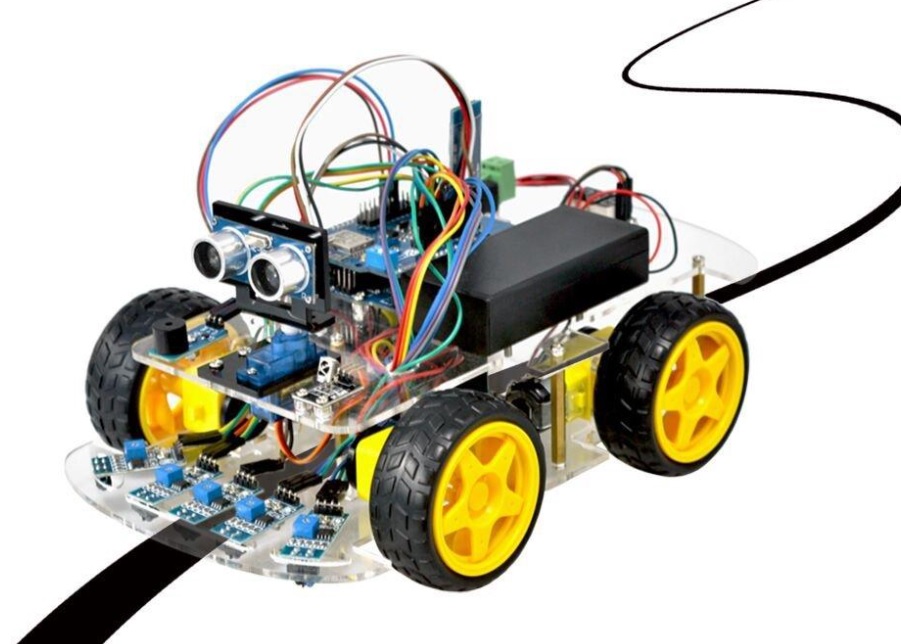
追跡センサーモジュールにより路面の黒い線を識別して、線走行を実現できます。
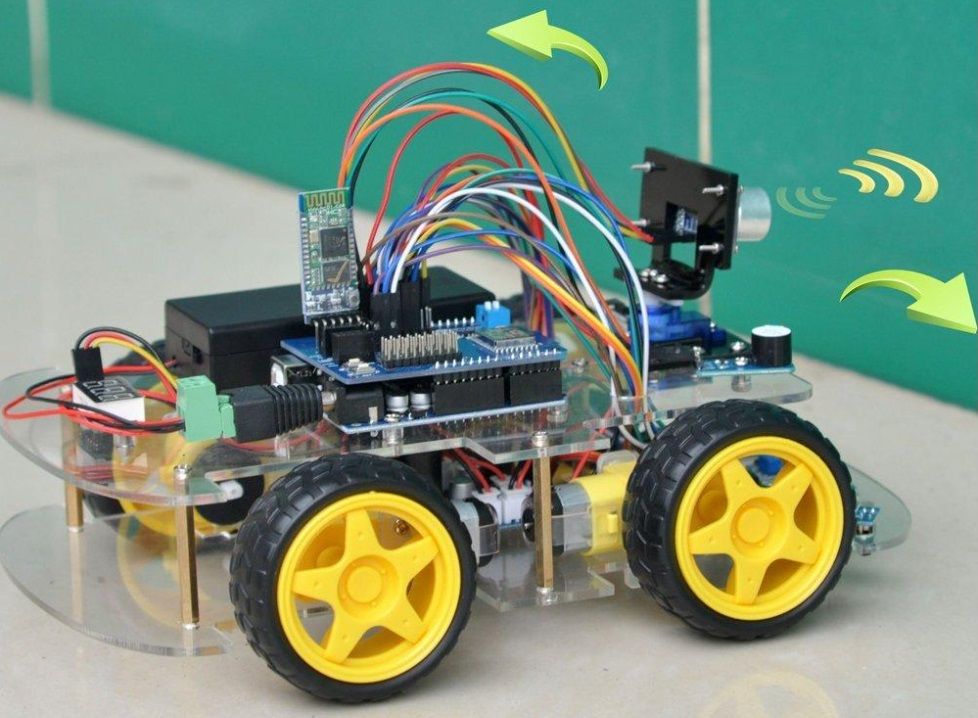
ロボットカーは、超音波距離センサーモジュールを搭載し、音波の反射時間から距離を計算することによって、前方の障害物を自動的に避けることができます。
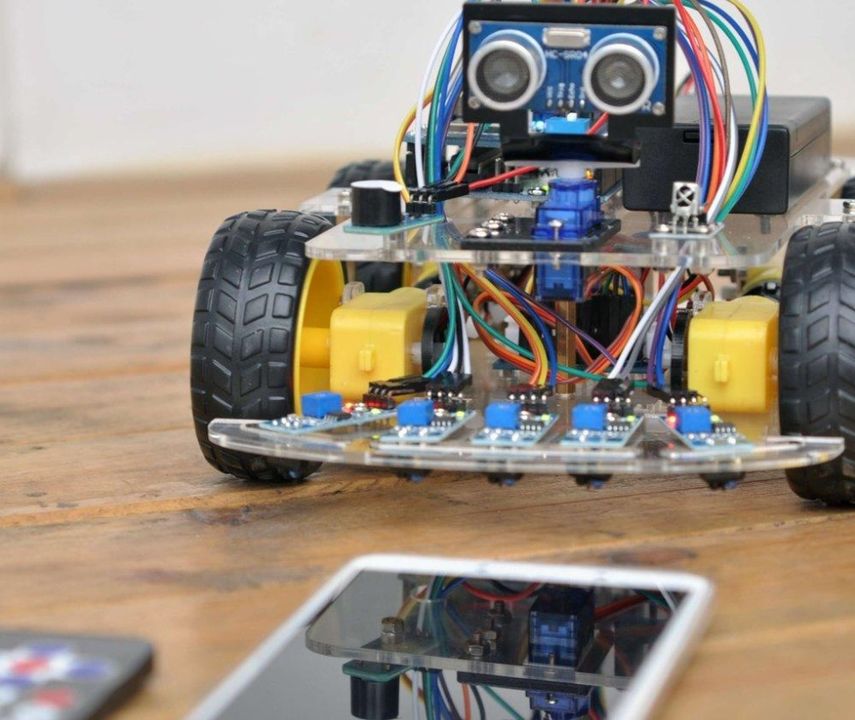
赤外線リモコン、Bluetooth、WiFiによりロボットカーを制御することができます。
↑クリックで拡大、再クリックで元に戻ります。
障害物回避や線走行は普通にわかりやすいので省略して、ロボットカーの四輪を制御する部分のみについて解説します。
OSOYOO Model-X Motor Driver Module
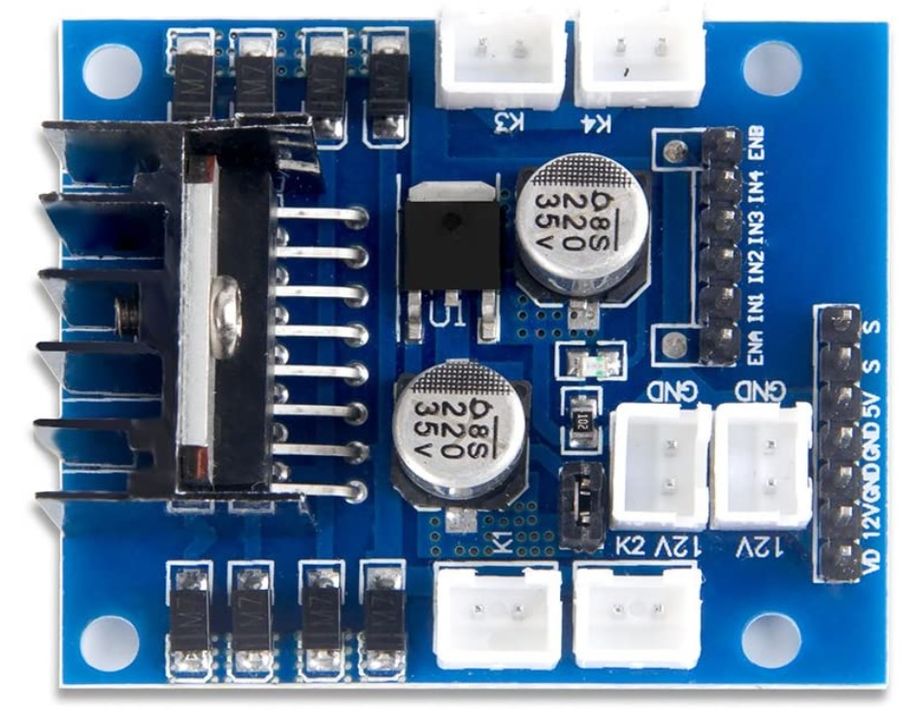
●瞬間ピーク電流は最大3A、定格電流25W
●2個の内蔵Hブリッジ
●2相ステッピングモーターまたは4相ステッピングモーター、2相DCモーターを駆動可能
●ドライブ電圧:5-35V、ロジック電圧:5V。※ドライブ電圧が12Vを超える場合は、外部5Vロジックを使用
Ref.OSOYOO Model-X Motor Driver Module
DC 3-6V ギヤードモーター + スマートカー & ロボットタイヤ 65*27mm

●動作電圧:3V~6VDC
●減速比:1:48
●無負荷回転速度(6V):100 RPM
●トルク:0.8KG.CM
●負荷電流:70mA(最大250mA)(3V)。
●タイヤ寸法:約 外径65mm、幅27mm、内径51mm
●モーターサイズ:65mm x 22mm x 20mm(シャフトなし)
●モダブルシャフトモーター
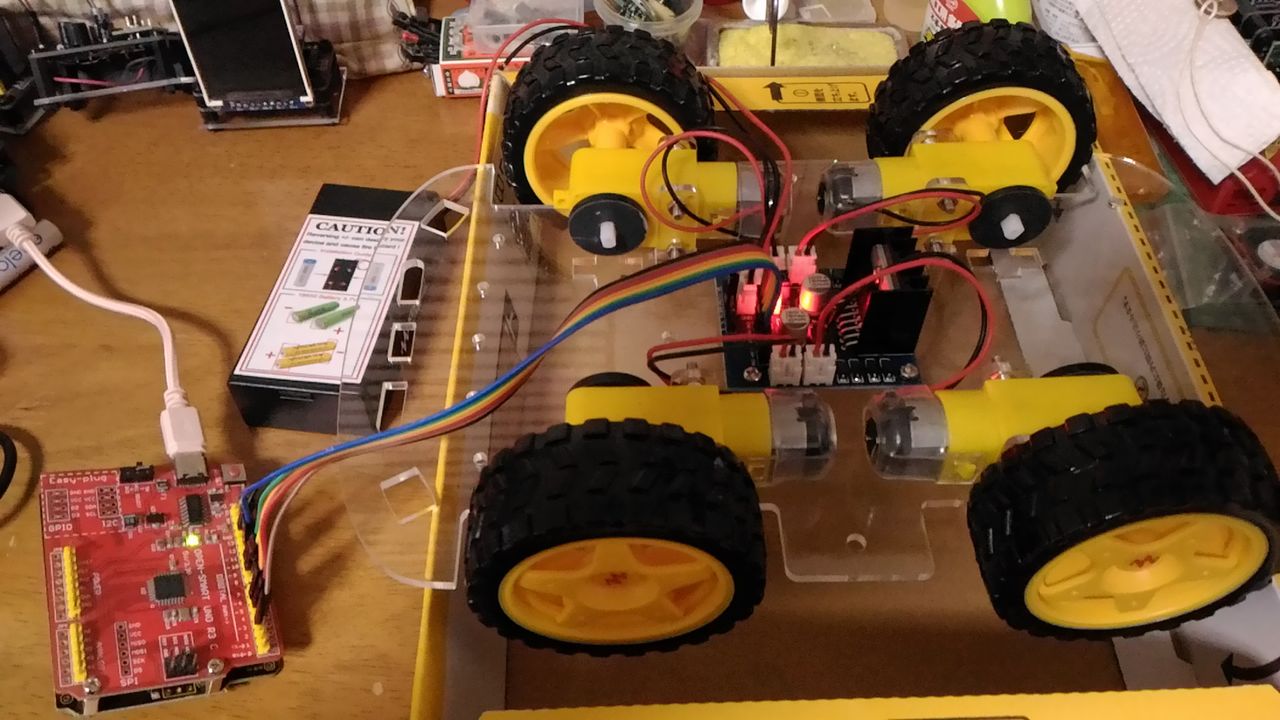
車体の中心にあるのがモータードライバ、左下の赤いボードがUNO R3互換機、その上のボックスが18650バッテリーボックスです。
この赤いUNOは同梱されていたものではありません。
通常のUNOにはメスピンソケットが付いていますが、このボードにはピンヘッダーをはんだ付けしています。
また、動作電圧3.3V←→5V切り替え可能な便利なボードです。
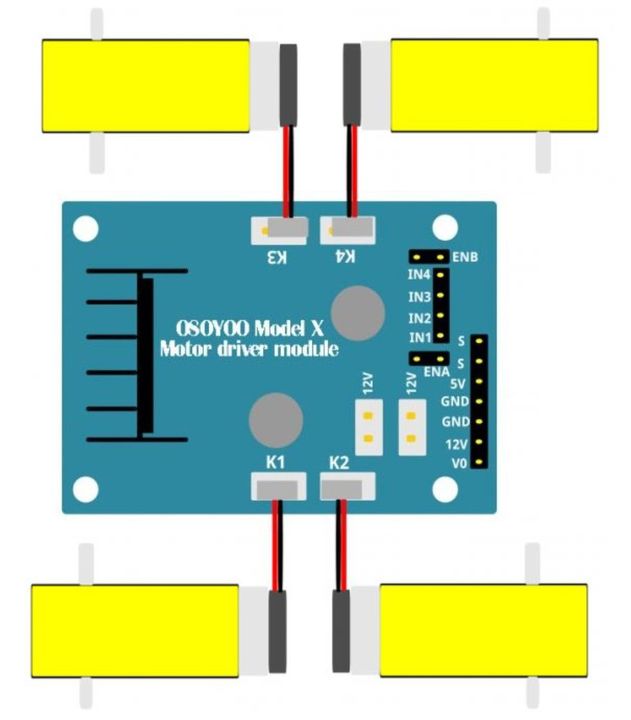
モーターとモータードライバモジュールの配線です。
右側の前輪をK2、後輪をK1ソケットに、左側前輪をK4、後輪をK3ソケットにつなげています。
12V と刻印されている2つのソケットのいずれでもよいのですが、ここに電池ボックスから7.4Vを供給しています。
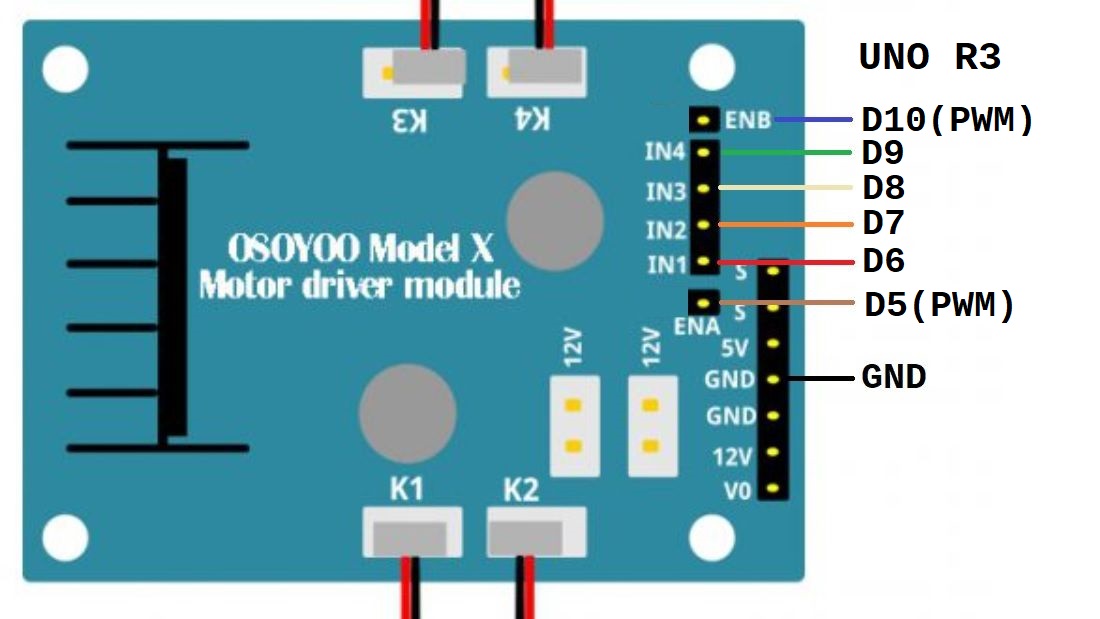
モータードライバモジュールとUNOを接続します。
右側のタイヤ2本は(ENA,IN1,IN2)の設定により制御され、2本とも同じ動きになります。
左側のタイヤ2本は(ENB,IN3,IN4)の設定により制御され、2本とも同じ動きになります。
このモータードライバでは、4本のタイヤを個別に動かすことはできません。
では右側のタイヤで動きを説明します。下の表では、LOWを0、HIGHを1としてあらわしています。
| ENA | IN1 | IN2 | The State of DC Motor |
|---|
| 0 | X | X | Stop |
|---|
| 1 | 0 | 0 | Brake |
|---|
| 1 | 0 | 1 | Rotate Clockwise |
|---|
| 1 | 1 | 0 | Rotate Counterclockwise |
|---|
| 1 | 1 | 1 | Brake |
|---|
・ENA(Enable-A)が0の場合、IN1(Input-1)、IN2(Input-2)の値に関わらず停止状態です。
・ENAが1で、IN1、IN2がともに0、あるいはともに1の場合にタイヤの回転が止まります。
・ENAが1、IN1が0、IN2が1の場合、タイヤは時計回りに回転します。
・ENAが1、IN1が1、IN2が0の場合、タイヤは反時計回りに回転します。
※ENB,IN3,IN4も同様です
左側の制御も加え、6つのパラメータの組み合わせで、ロボットカーの動きを制御できます。
| ENA | IN1 | IN2 | ENB | IN3 | IN4 | Motion |
|---|
| 1 | 0 | 0 | 1 | 0 | 0 | 停止 |
|---|
| 1 | 0 | 1 | 1 | 0 | 1 | 前進 |
|---|
| 1 | 1 | 0 | 1 | 1 | 0 | 後退 |
|---|
| 1 | 0 | 1 | 1 | 1 | 0 | 右スピン |
|---|
| 1 | 1 | 0 | 1 | 0 | 1 | 左スピン |
|---|
テストコード
#define ENA_PIN 5 // Needs to be a PWM pin to be able to control motor speed
#define IN1_PIN 6 // Motor direction
#define IN2_PIN 7 // Motor direction
#define IN3_PIN 8 // Motor direction
#define IN4_PIN 9 // Motor direction
#define ENB_PIN 10 // Needs to be a PWM pin to be able to control motor speed
void go_Advance(int speed_L,int speed_R) { //Forward
digitalWrite(IN1_PIN, HIGH);
digitalWrite(IN2_PIN, LOW );
digitalWrite(IN3_PIN, HIGH);
digitalWrite(IN4_PIN, LOW );
set_MotorSpeed(speed_L, speed_R);
}
void go_Left(int speed_L,int speed_R) { //Turn left
digitalWrite(IN1_PIN, HIGH);
digitalWrite(IN2_PIN, LOW );
digitalWrite(IN3_PIN, LOW );
digitalWrite(IN4_PIN, HIGH);
set_MotorSpeed(speed_L, speed_R);
}
void go_Right(int speed_L,int speed_R) { //Turn right
digitalWrite(IN1_PIN, LOW );
digitalWrite(IN2_PIN, HIGH);
digitalWrite(IN3_PIN, HIGH);
digitalWrite(IN4_PIN, LOW );
set_MotorSpeed(speed_L, speed_R);
}
void go_Back(int speed_L,int speed_R) { //Reverse
digitalWrite(IN1_PIN, LOW );
digitalWrite(IN2_PIN, HIGH);
digitalWrite(IN3_PIN, LOW );
digitalWrite(IN4_PIN, HIGH);
set_MotorSpeed(speed_L, speed_R);
}
void stop_Stop() { //Stop
digitalWrite(IN1_PIN, LOW );
digitalWrite(IN2_PIN, LOW );
digitalWrite(IN3_PIN, LOW );
digitalWrite(IN4_PIN, LOW );
}
void set_MotorSpeed(int speed_L,int speed_R) {
analogWrite(ENB_PIN,speed_L);
analogWrite(ENA_PIN,speed_R);
}
//Pins initialize
void init_GPIO() {
pinMode(IN1_PIN, OUTPUT);
pinMode(IN3_PIN, OUTPUT);
pinMode(IN2_PIN, OUTPUT);
pinMode(IN4_PIN, OUTPUT);
stop_Stop();
}
void setup() {
init_GPIO();
go_Advance(255,255);//Forward
delay(2000);
go_Back(255,255);//Reverse
delay(2000);
go_Left(255,255);//Turn left
delay(2000);
go_Right(255,255);//Turn right
delay(2000);
stop_Stop();//Stop
}
void loop(){}
実際の動きは、このページのトップ画像をクリックして、YouTube動画をご覧ください。
実際にはENA,ENBはPWM制御が可能で、0~255までの値を指定することでスピードを制御できます。
右側と左側のタイヤを逆方向に回転させてしまうと、右折、左折ではなく、車体がくるくると右回転、左回転してしまいます。
そこで、右折したい場合には、左右両方のタイヤを時計回転させて、右側のタイヤのみ回転数を落とします。
go_Advance(255,255);
↓
go_Advance(255,100);
のように変更すると、右側タイヤ2本の回線数が下がります。
■参考文献
・第2回:はじめてのモータドライバ
・【Arduino入門編⑧】サーボモーターを動かしてみる
・【Arduino入門編㉒】ArduinoでDCモーターを制御する。【L298Nデュアルモータードライバ】
|
 Raspberry Pi(ラズベリー パイ)は、ARMプロセッサを搭載したシングルボードコンピュータ。イギリスのラズベリーパイ財団によって開発されている。
Raspberry Pi(ラズベリー パイ)は、ARMプロセッサを搭載したシングルボードコンピュータ。イギリスのラズベリーパイ財団によって開発されている。

 KEYESTUDIO Micro:bit V2ロボットスターターキット (マイクロビットなし) MakecodeとPython用
KEYESTUDIO Micro:bit V2ロボットスターターキット (マイクロビットなし) MakecodeとPython用
動き、光と音の使い方、障害物の検知と回避方法、線をたどり、IRリモコンとアプリでコントロールする方法を学びます。
 Maqueen Lite V5 micro:bit ロボットキット STEM用(ライントレース&障害物回避)
Maqueen Lite V5 micro:bit ロボットキット STEM用(ライントレース&障害物回避)
Maqueen Lite V5 STEMロボットは、事前調整済みのライントレースアルゴリズム、耐衝撃モーター、開封即使用可能な設計で、ストレスを解消します。
 たいていのことは100日あれば、うまくいく。長田英知著
たいていのことは100日あれば、うまくいく。長田英知著
「時間がなくて、なかなか自分のやりたいことができない」
「一念発起して何かを始めても、いつも三日坊主で終わってしまう」
「色んなことを先延ばしにしたまま、時間だけが過ぎていく」
そこで本書では、そんな著者が独自に開発した、
まったく新しい目標達成メソッド「100日デザイン」について、
その知識と技術を、余すところなくご紹介します。
 まんがで納得ナポレオン・ヒル 思考は現実化する
まんがで納得ナポレオン・ヒル 思考は現実化する
OLとして雑務をこなす日々に飽き足らず、科学者だった父が残した薬品を商品化すべく、起業を決意した内山麻由(27)。彼女はセミナーで知り合った謎の女性からサポートを得ながら、彼女と二人三脚でナポレオン・ヒルの成功哲学を実践し、さまざまな問題を乗り越えていく。
ヒル博士の<ゴールデンルール>に従い、仕事に、恋に全力疾走する彼女の、成功への物語。
 今日は人生最悪で最高の日 1秒で世界を変えるたったひとつの方法 ひすいこたろう著
今日は人生最悪で最高の日 1秒で世界を変えるたったひとつの方法 ひすいこたろう著
偉人の伝記を読むと、最悪な日は、不幸な日ではなく、新しい自分が始まる日であることがわかります。最悪な出来事は、自分の人生が、想像を超えて面白くなる兆しなのです。偉人伝を読むことで、このときの不幸があったおかげで、未来にこういう幸せがくるのかと、人生を俯瞰する視線が立ち上がるのです。
 ご飯は私を裏切らない heisoku著
ご飯は私を裏切らない heisoku著
辛い現実から目を背けて食べるご飯は、いつも美味しく幸せを届けてくれる。
29歳、中卒、恋人いない歴イコール年齢。バイト以外の職歴もなく、短期バイトを転々とする日々。ぐるぐると思索に耽るけど、ご飯を食べると幸せになれる。奇才の新鋭・heisokuが贈るリアル労働グルメ物語!
 【最新版Gemini 3に対応!】できるGemini (できるシリーズ)
【最新版Gemini 3に対応!】できるGemini (できるシリーズ)
Geminiを「最強の知的生産パートナー」として使いこなすための、実践的なノウハウを凝縮した一冊です。
基本的な操作方法から、具体的なビジネスシーンでの活用、日々の業務を自動化するGoogle Workspaceとの連携、さらには自分だけのオリジナルAIを作成する方法まで余すところなく解説します。
 Rustプログラミング完全ガイド 他言語との比較で違いが分かる!
Rustプログラミング完全ガイド 他言語との比較で違いが分かる!
Rustの各手法や考え方を幅広く解説!
500以上のサンプルを掲載。実行結果も確認。
全24章の包括的なチュートリアル。
 ポチらせる文章術
ポチらせる文章術
販売サイト・ネット広告・メルマガ・ブログ・ホームページ・SNS…
全WEB媒体で効果バツグン!
カリスマコピーライターが教える「見てもらう」「買ってもらう」「共感してもらう」すべてに効くネット文章術
 小型で便利な Type-C アダプター USB C オス - USB3.1 オスアダプター
小型で便利な Type-C アダプター USB C オス - USB3.1 オスアダプター
Type-C端子のマイコンボードをこのアダプタを介して直接Raspberry Piに挿すことができます。ケーブルなしで便利なツールです。
 Divoom Ditoo Pro ワイヤレススピーカー
Divoom Ditoo Pro ワイヤレススピーカー
15W高音質重低音/青軸キーボード/Bluetooth5.3/ピクセルアート 専用アプリ/USB接続/microSDカード
 電源供給USBケーブル スリム 【5本セット】
電源供給USBケーブル スリム 【5本セット】
USB電源ケーブル 5V DC電源供給ケーブル スリム 【5本セット】 電源供給 バッテリー 修理 自作 DIY 電子工作 (100cm)
|