TM1637 & ATtiny85
2022.01.25 / 2022.02.23追記
YouTube でも紹介しています。画像をクリックすると再生できます。
I2CライクなLEDドライバIC・TM1637とAVRマイコン・ATtiny85を使って簡単に数値を表示できるようにします。
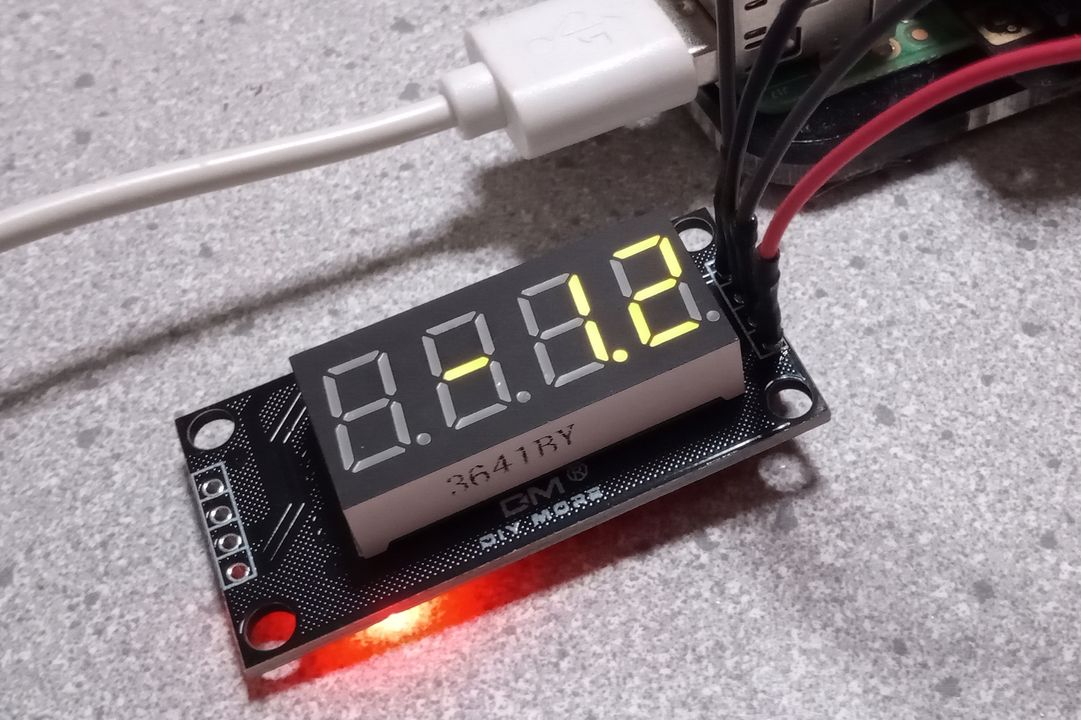
TM1637は、8セグメント6桁 LEDドライバです。ここではTM1637搭載の4桁LEDディスプレイを使用します、
■0.36インチ黄色TM1637 7セグメント4桁ledモジュール

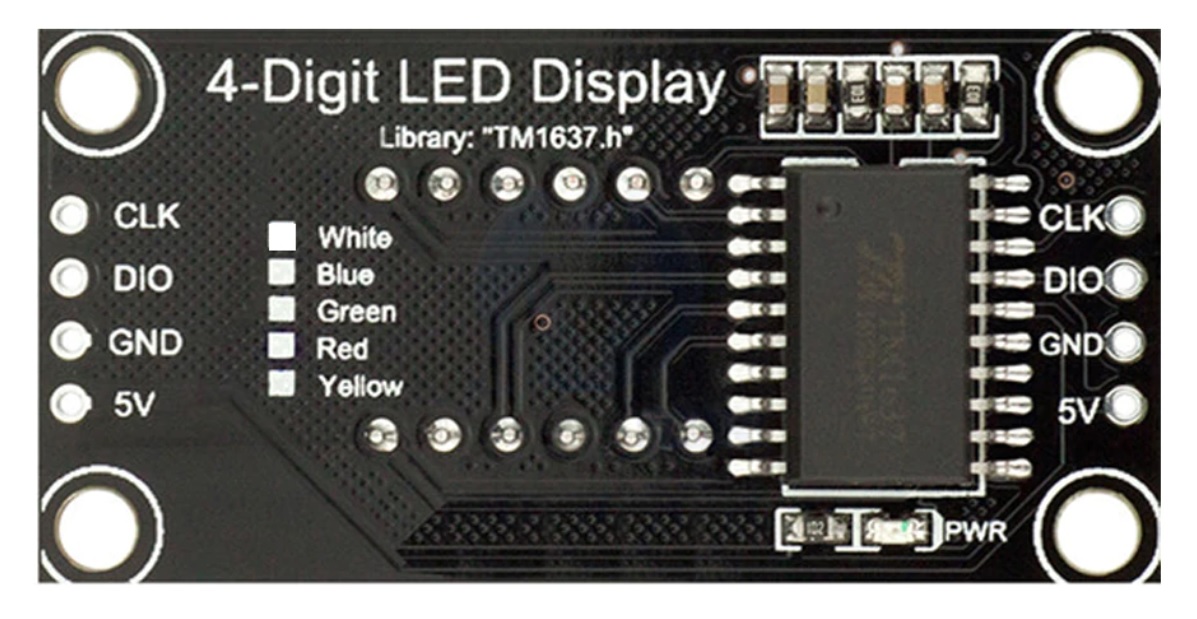
■7セグメント用LEDドライバーIC TM1637
 中国タイタンマイクロエレクトロニクス社のキースキャニング機能付きの7セグメント用LEDドライバーICです。
中国タイタンマイクロエレクトロニクス社のキースキャニング機能付きの7セグメント用LEDドライバーICです。
・動作電圧:5V
・ピン数:20ピン
・信号線:3本
・ドライブ数:8ドットx6桁
・最大駆動電流:7セグメントLED1個当たり合計200mA
・極性:アノードコモン
・キースイッチ数:8x2
■開発環境
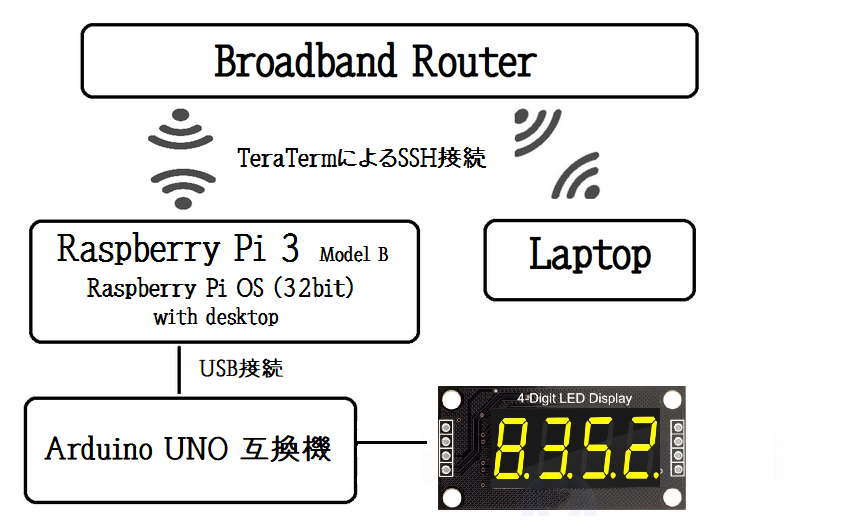
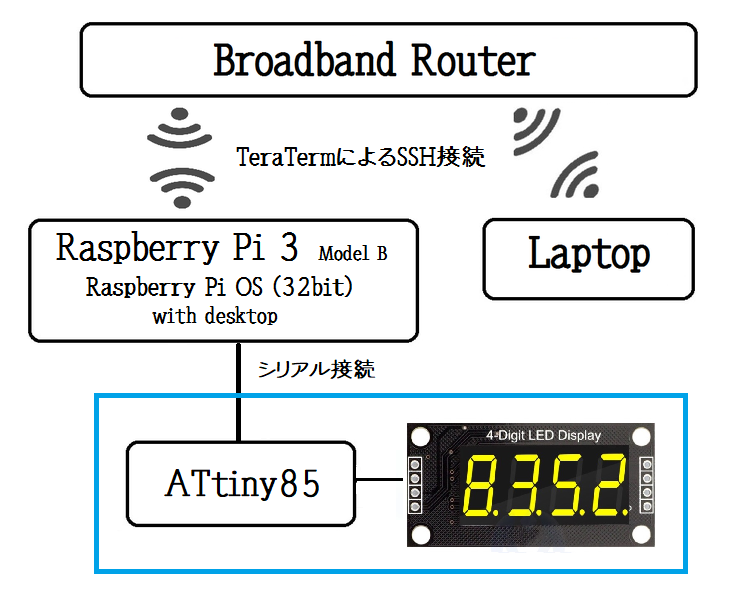
ノートパソコンから、TeraTermによりラズベリーパイにSSH接続して操作します。
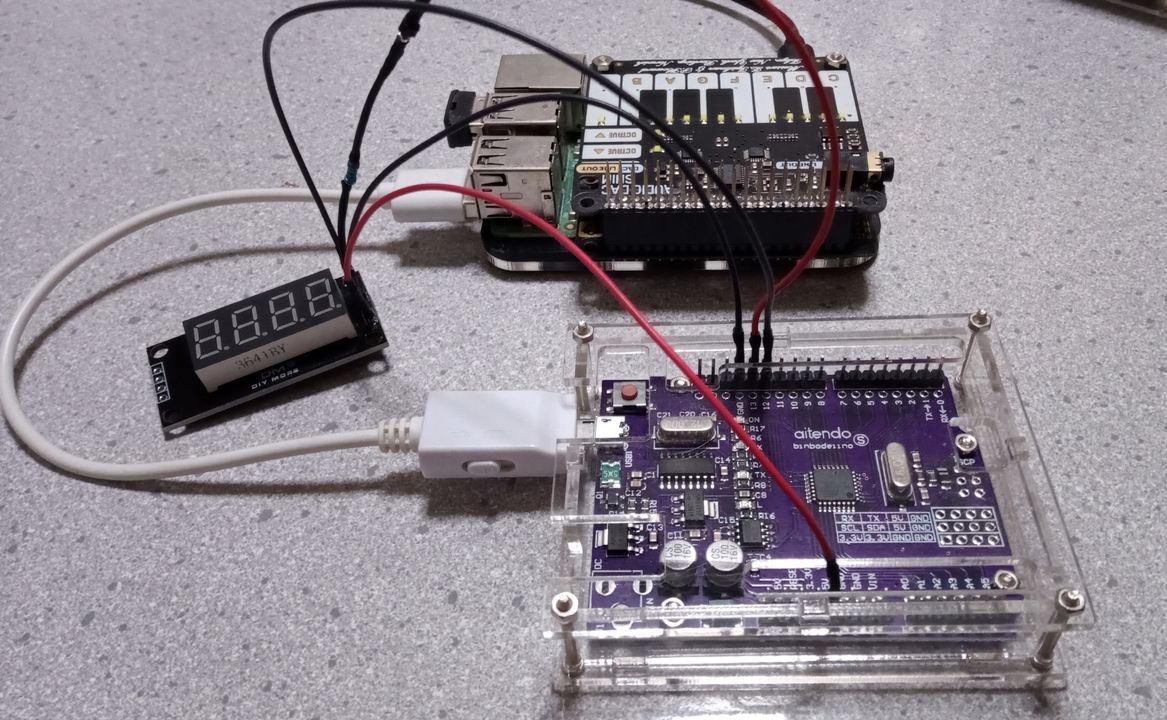
aitendo びんぼうでいいの(Arduino UNO互換)と 色々カスタマイズしていますが、Raspberry Pi 3 model B です。
ラズベリーパイのOSは、Raspbian GNU/Linux 10 (buster) です。
| Arduino UNO | - | TM1637 |
|---|
| 12 | -------- | CLK |
| 13 | --1KΩ-- | DIO |
| GND | -------- | GND |
| 5V | -------- | 5V |
マスターとスレーブ側で正負極性反転による過電流防止に、Arduino UNOの13番ピンとTM1637モジュールのDIOの間に、1KΩの抵抗を挟んでいます。
ビルドには、PlatformIOを使用しています。
→ Arduino開発環境構築 PlatformIO
■サンプルプログラム
$ mkdir ~/TM1637
$ cd ~/TM1637
$ pio init -b uno
$ vi src/tm1637.ino
では、プログラムを解説していきます。
■Interface
TM1637ドライバはI2Cライクなデータ制御方式が取られています。
通信の開始はI2Cと同じくスタートコンディション(クロックがHIGHの時にデータラインがHIGH⇒LOW)によって開始されます。
データの送信は1バイト単位ですが、I2Cとは逆に、TM1637では各バイトを下位ビット(LSB)から順に送信します。
データの8ビット目が送信終了(第8クロックの立下り)すると、TM1637側でACK信号が生成され、自動的にDIOをLowレベルに立ち下げます(第9クロック)。
その後、9bit目のクロックの立ち上がり時にACKの立ち下げは解除されます。
TM1637側は受信バイトに対してACK以外の応答をしませんから、DIOピンのモードをいちいち送信から受信に切り替えなくとも、早めのタイミングで自分でLOWにすれば送信モードのまま変えずにいけます。
もしLOWにするタイミングが遅すぎて、スレーブが先にLOWを出す場合は正負で引きあうので注意。もし仮にそういう間違いをしても数マイクロセカンドだけですが心配ならDIOへの接続に数百オーム(1KΩ)の抵抗をいれれば安心です。
void _pinMode(uint8_t pin, uint8_t mode) {
pinMode(pin, mode);
delayMicroseconds(100);
}
void cmd(uint8_t adr, uint8_t val) {
// スタートコンディション
_pinMode(CLK, INPUT); // HIGH
_pinMode(DIO, INPUT); // HIGH
_pinMode(DIO, OUTPUT); // LOW
uint8_t data = adr;
for(uint8_t i=0; i<8; i++) {
// CLK=LOW:データの送信はクロックがLOWの時に行う
_pinMode(CLK, OUTPUT);
// ビットセット
if ((data>>i)&0x01)
_pinMode(DIO, INPUT);
else
_pinMode(DIO, OUTPUT);
// CLK=HIGH:1ビットのデータの区切り
_pinMode(CLK, INPUT);
}
// ACK信号待ち
_pinMode(CLK, OUTPUT);
// CLKをHIGHにすることでACK解除
_pinMode(CLK, INPUT);
_pinMode(CLK, OUTPUT);
// ストップコンディション
// _pinMode(DIO, OUTPUT);
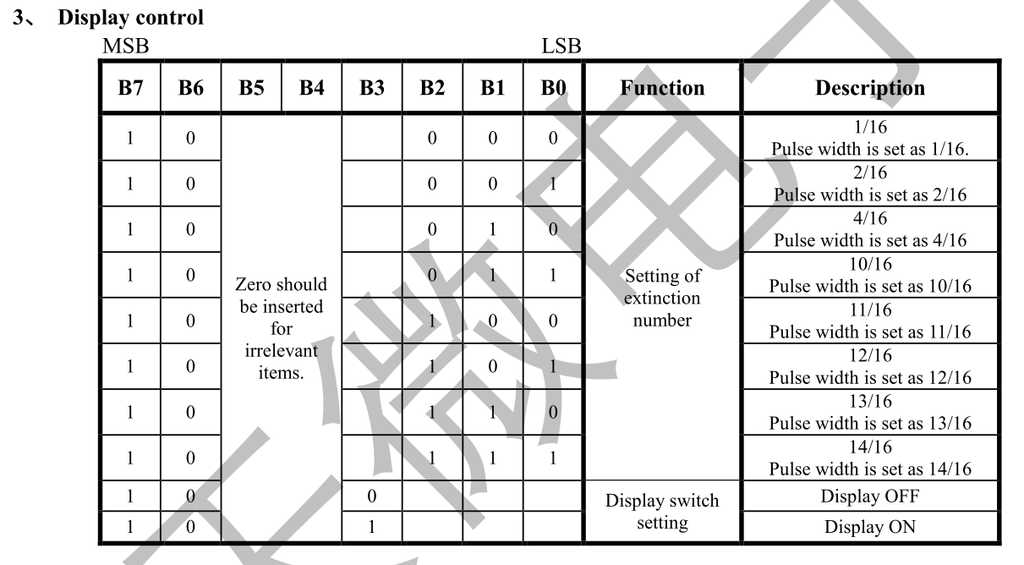
■明るさの調整
明るさは最低にしています。
cmd(0x88, 0x00); // Pulse width is set as 1/16 & ON
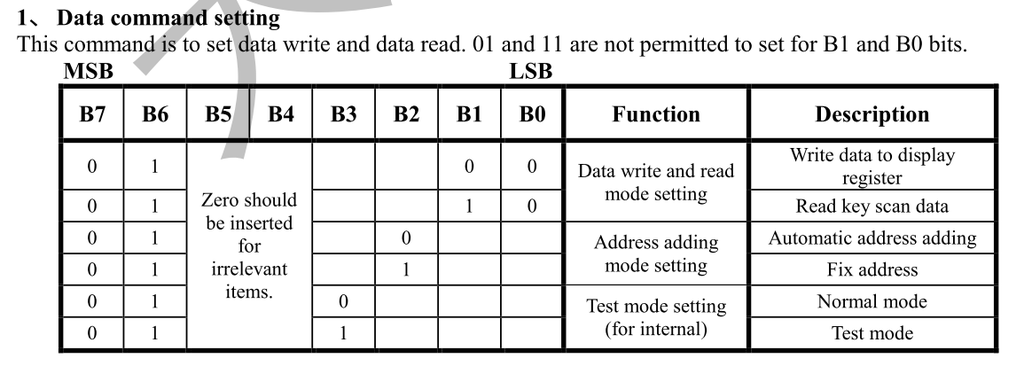
■モード設定
表示する桁位置(アドレス)の指定方法を設定します。
今回はアドレスを直接指定します。
cmd(0x44, 0x00); //固定アドレスモード
■シリアルデータ受信
Arduino UNO が、外部からシリアル通信で数値文字列を受信して、TM1637で表示する仕様を考えてみます。
部屋の温度を表示することを目的として、符号付きで整数部最大2桁、小数点以下1桁とします。
例えば、「-1.23」[改行] のようなデータを受信した場合は、「 -12」[null] に変換します。
小数点を削除して、表示が4桁になるようにマイナス符号の前に1文字分の空白をいれます。
void loop() {
while (Serial.available()) {
char c = Serial.read();
if (c == '\n') {
*p = null;
double fval = atof(buf);
if (fval < 100) {
dtostrf(fval,5,1,buf);
buf[3] = buf[4];
・・・・・・
} else {
*p = c;
++p;
}
Arduino系のsprintf()関数では浮動小数点を表すフォーマット指定子が使用できないので、dtostrf()関数を用います。
sprintf(str,"%5.1f",-12.34);
↓
dtostrf(-12.34,5,1,str);
で代用します。
Ref.Arduinoでsprintfの書式とfloatの扱い方、0埋めとか
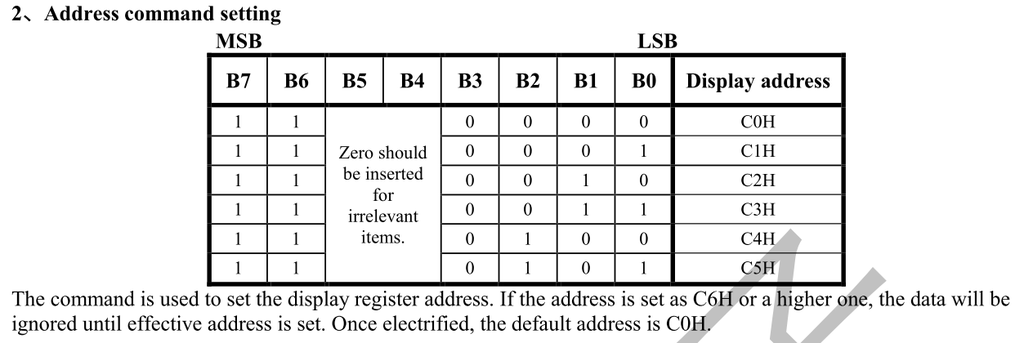
■数字の表示
アドレスを直接指定して、数字データを送信します。
uint8_t num[10] = {0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F};
for (int i=0;i<4;++i) {
switch(buf[i]) {
case ' ':
cmd(0xC0+i,0x00);
break;
case '-':
cmd(0xC0+i,0x40);
break;
default:
if (i==2) {
cmd(0xC0+i,num[buf[i]-0x30]|0x80);
} else {
cmd(0xC0+i,num[buf[i]-0x30]);
}
break;
}
}
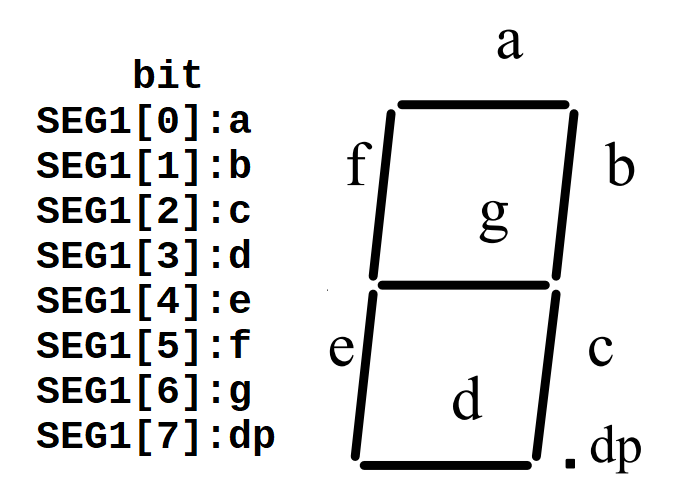
num[10] = {0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F};
は0~9までの数字データです。
ソースコード中の
cmd(0xC0+i,num[buf[i]-0x30]|0x80);
は、数字にドットの情報を追加しています。
■ソースコード
#define CLK 12
#define DIO 13
#define null '\0'
char buf[10], *p;
const uint8_t num[10] = {0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F};
void _pinMode(uint8_t pin, uint8_t mode) {
pinMode(pin, mode);
delayMicroseconds(100);
}
void cmd(uint8_t adr, uint8_t val) {
// スタートコンディション
_pinMode(CLK, INPUT); // HIGH
_pinMode(DIO, INPUT); // HIGH
_pinMode(DIO, OUTPUT); // LOW
uint8_t data = adr;
for(uint8_t i=0; i<8; i++) {
// CLK=LOW:データの送信はクロックがLOWの時に行う
_pinMode(CLK, OUTPUT);
// ビットセット
if ((data>>i)&0x01)
_pinMode(DIO, INPUT);
else
_pinMode(DIO, OUTPUT);
// CLK=HIGH:1ビットのデータの区切り
_pinMode(CLK, INPUT);
}
// ACK信号待ち
_pinMode(CLK, OUTPUT);
// CLKをHIGHにすることでACK解除
_pinMode(CLK, INPUT);
_pinMode(CLK, OUTPUT);
// ストップコンディション
// _pinMode(DIO, OUTPUT);
if (adr >= 0xC0) {
_pinMode(CLK, INPUT);
_pinMode(DIO, INPUT);
_pinMode(DIO, OUTPUT);
uint8_t data = val;
for(uint8_t i=0; i<8; i++) {
_pinMode(CLK, OUTPUT);
if ((data>>i)&0x01)
_pinMode(DIO, INPUT);
else
_pinMode(DIO, OUTPUT);
_pinMode(CLK, INPUT);
}
_pinMode(CLK, OUTPUT);
_pinMode(CLK, INPUT);
_pinMode(CLK, OUTPUT);
_pinMode(DIO, OUTPUT);
}
}
void setup() {
Serial.begin(9600);
cmd(0x44, 0x00); //固定アドレスモード
for (int i=0;i<4;++i) cmd(0xC0+i,0x00);
cmd(0x88, 0x00); // Pulse width is set as 1/16 & ON
p = buf;
}
void loop() {
while (Serial.available()) {
int inByte = Serial.read();
if (inByte == 0x0a) {
*p = null;
double fval = atof(buf);
if (fval < 100) {
cmd(0x44, 0x00); //固定アドレスモード
dtostrf(fval,5,1,buf);
buf[3] = buf[4];
for (int i=0;i<4;++i) {
switch(buf[i]) {
case ' ':
cmd(0xC0+i,0x00);
break;
case '-':
cmd(0xC0+i,0x40);
break;
default:
if (i==2) {
cmd(0xC0+i,num[buf[i]-0x30]|0x80);
} else {
cmd(0xC0+i,num[buf[i]-0x30]);
}
break;
}
}
}
p = buf;
} else {
*p = inByte;
++p;
}
}
delay(50);
}
ビルドして、デバイスモニターを起動します。
$ pio run -t upload
$ pio device monitor -p /dev/ttyUSB0 -b 9600
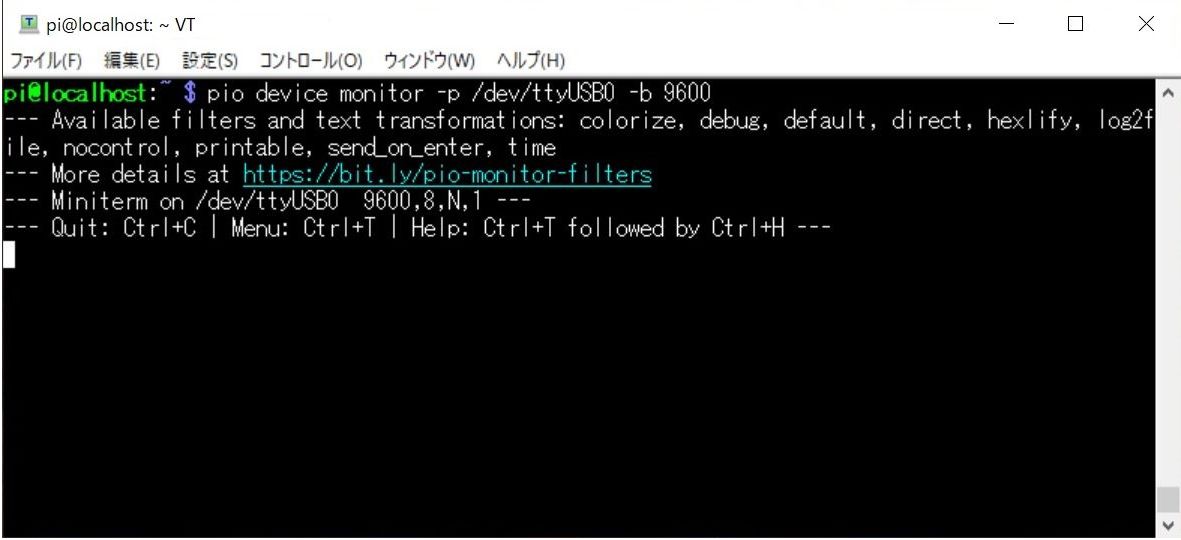
デバイス・モニターに、「-1.23」と打ち込んで送信してみます。
小数点以下2桁目が四捨五入されて、右詰めで表示されます。
■モジュール化
この程度の処理に、Arduino UNO は贅沢なので、ATtiny85 を使ってモジュール化します。
◇Arduino UNO → ATtiny85 への書き換え
#define CLK 12
#define DIO 13
void setup() {
Serial.begin(9600);
↓変更
#include <SoftwareSerial.h>
SoftwareSerial mySerial(1, 0); // RX, TX
#define CLK 3
#define DIO 4
void setup() {
mySerial.begin(9600);
ハードウェア・シリアルもエミュレートしているようですが、そちらを使用すると改行[LF]コードなどが正常に取得されず文字化けしてしまいました。
プログラムを、ATtiny85 に焼き付けます。
$ mkdir ~/ATtiny85
$ cd ~/ATtiny85
$ pio init -b attiny85
$ vi platformio.ini
[env:attiny85]
platform = atmelavr
board = attiny85
framework = arduino
upload_protocol = custom
upload_port = /dev/ttyUSB0
upload_speed = 9600
board_build.f_cpu = 1000000L
upload_flags =
-C
; use "tool-avrdude-megaavr" for the atmelmegaavr platform
$PROJECT_PACKAGES_DIR/tool-avrdude/avrdude.conf
-p
$BOARD_MCU
-P
$UPLOAD_PORT
-b
$UPLOAD_SPEED
-c
stk500v1
upload_command = avrdude $UPLOAD_FLAGS -U flash:w:$SOURCE:i
書込み方法は下記を参照してください。
AVRマイコン・ATTiny85
$ pio run -t upload
書き込まれたヒューズの値をみてみると
avrdude: safemode: Fuses OK (E:FF, H:D9, L:62)
ローヒューズの値が、0x62(0b01100010)で第7ビット CKDIV8=0により、クロックが8分周され、1MHzでの動作することがわかります。
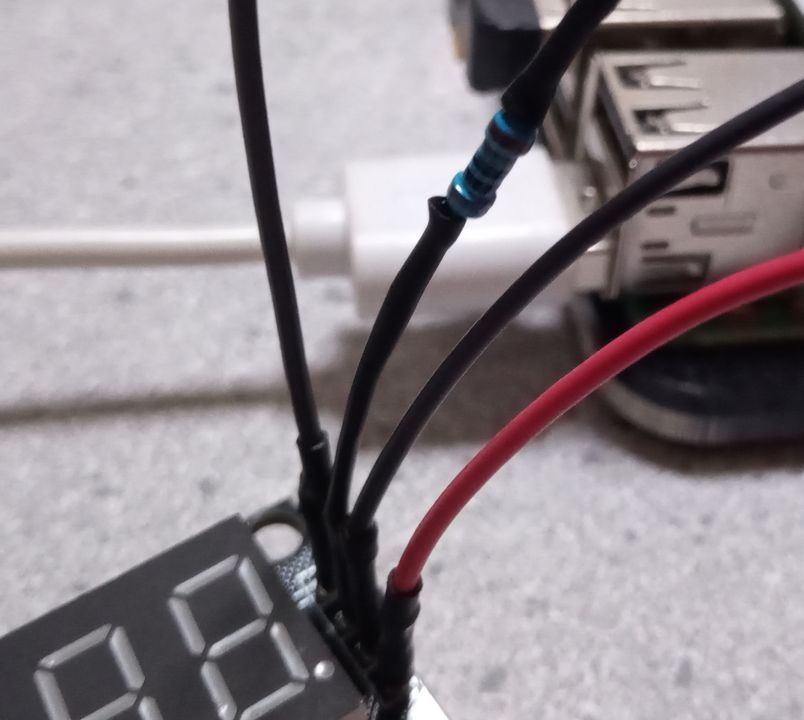
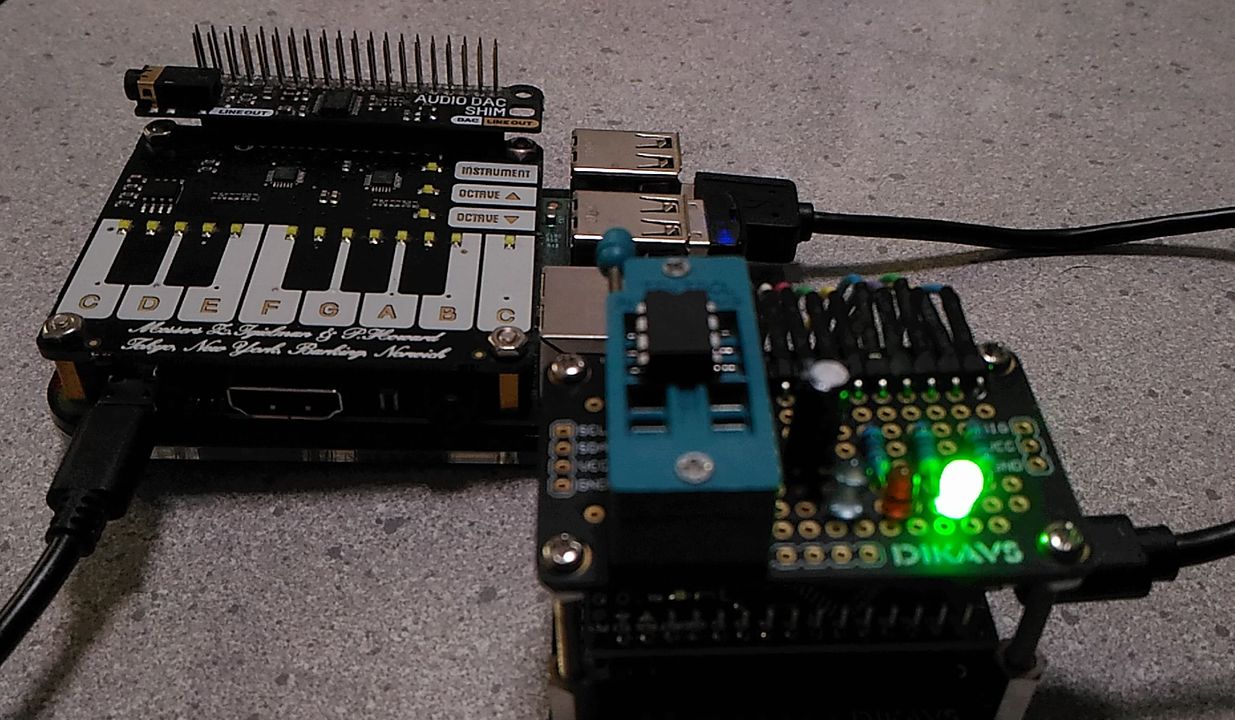
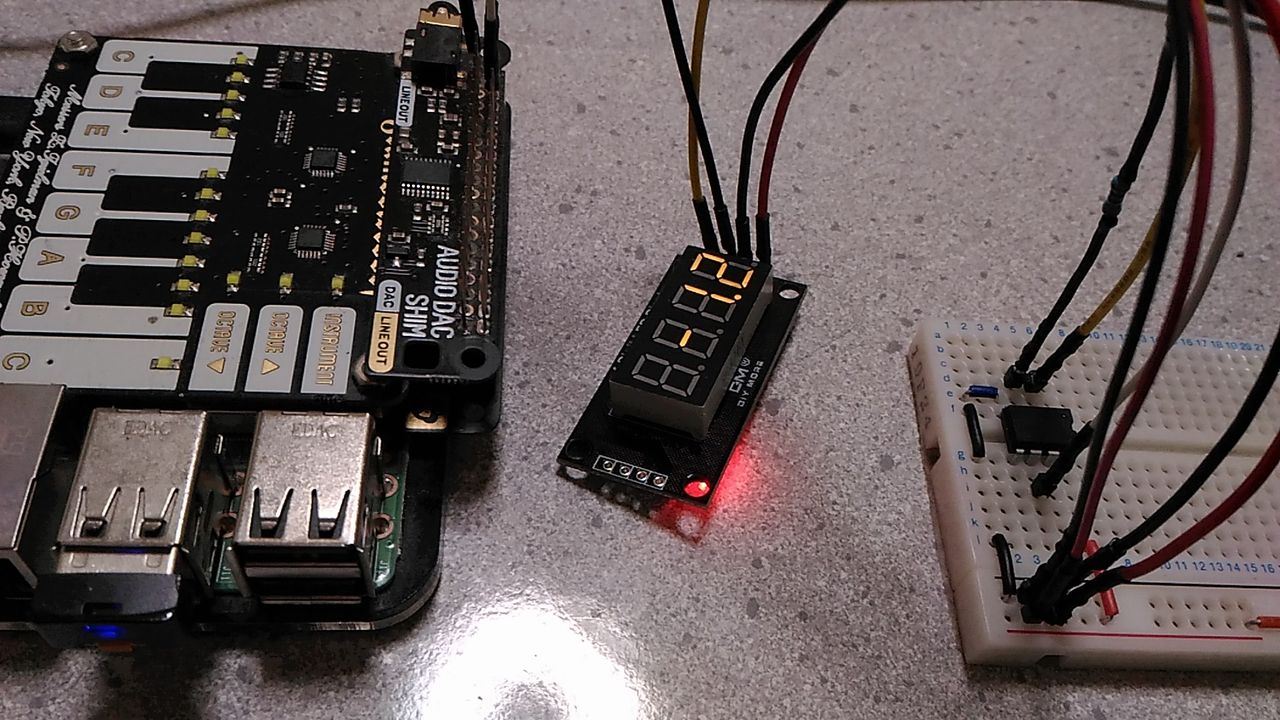
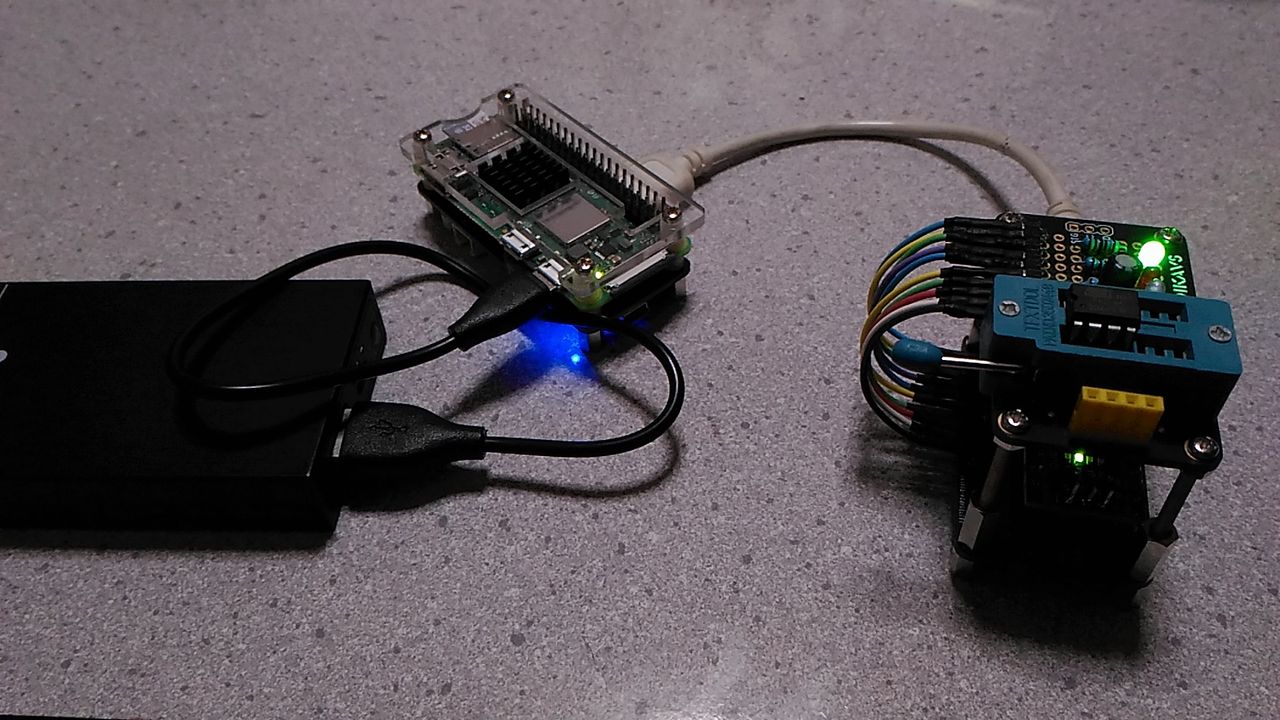
Raspberry Pi - ATtiny85 - TM1637 を接続します。
| Raspberry Pi | - | ATtiny85 | - | TM1637 |
|---|
| | A3:2 | -------- | CLK |
| | A2:3 | --1KΩ-- | DIO |
| GND:6 | -------- | GND:4 | -------- | GND |
| 3v3:1 | -------- | VCC:8 | -------- | 5V |
| TXD:8 | -------- | 6:RXD | | |
通信はラズベリーパイからATtinyへ一方向なので、接続はTXD→RXDのみです。
$ pio device monitor -p /dev/ttyAMA0 -b 4800
デバイス・モニターに、「-1.23」と打ち込むと、「-1.2」と表示されます。
※シリアル通信の問題点
今回、ATtiny85に関しては、ヒューズビットを変更して、外部発振子を付けても、同期が取れず文字化けや無反応といった問題に悩まされました。
結果的に以下の方法で解決できました。
コード内の通信速度設定では、9600 を指定していますが、
mySerial.begin(9600);
Raspberry Pi とのシリアル通信速度はその半分の、4800 で行います。
$ pio device monitor -p /dev/ttyAMA0 -b 4800
ATtiny85には、ハードウェアUARTがありません。
ハードウェアに関しては素人なのでよくはわからないのですが、
ソフトウェアUARTの実装には、AVRマイコンTinyシリーズ特有のUSI(Universal Serial Interface/汎用シリアルインターフェース)UARTが使用されており、
これが半二重通信であることに起因するのではと思っています。
また、動作クロック1MHzで、ソフトウェアシリアルの速度を9600よりも速くすると、通信できませんでした。
ATtinyCoreパッケージを使うことで、28800bpsまで速度を向上することができました。記事を後ろに追加しています。(2022/02/23追記)
■TM1637 と ATtiny85 の統合
最後に、TM1637 と ATtiny85 を1つにまとめてしまいます。
◇両面TH丸型ユニバーサル基板 27mm
(ペットボトル基板)
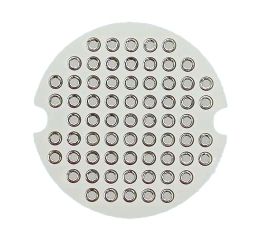 (株)矢島製作所/秋月電子通商
(株)矢島製作所/秋月電子通商
日本製のペットボトル飲料のキャップにぴったり入るサイズです。
・穴径:67穴/1.0mm/スルーホール/両面
・ランドピッチ(長辺/短辺):2.54mm/2.54mm
・板厚:1mm
・長辺/短辺外形:φ27mm/26.73mm
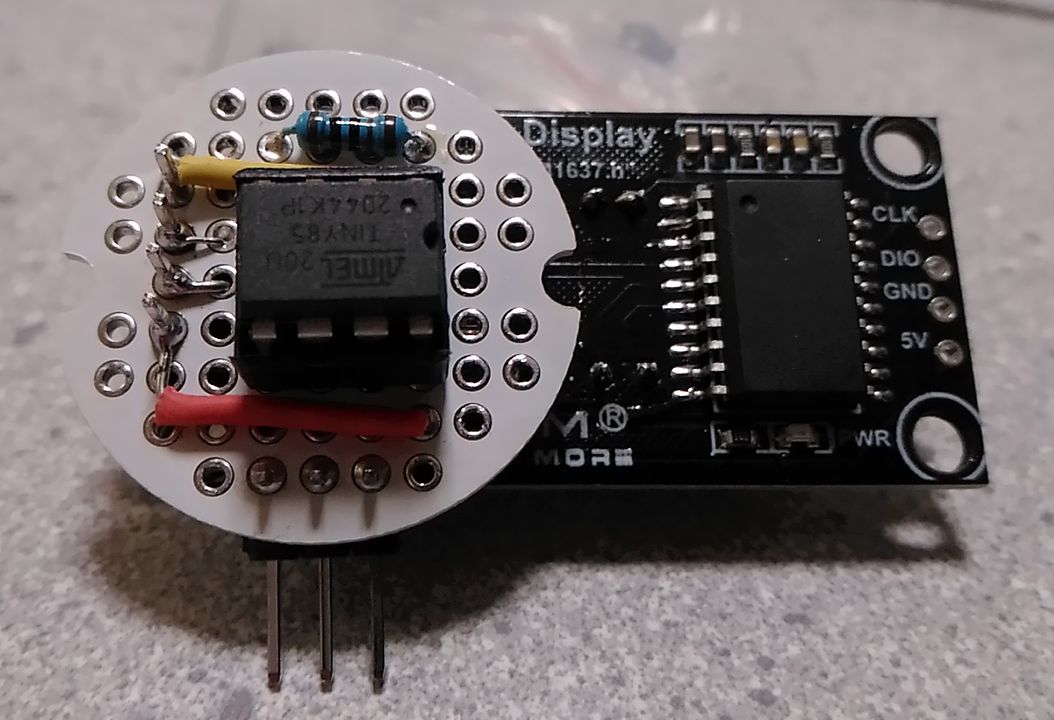
丸型ユニバーサル基板にATtiny85と配線を施し、TM1637のピン方向を下向きに変えています。
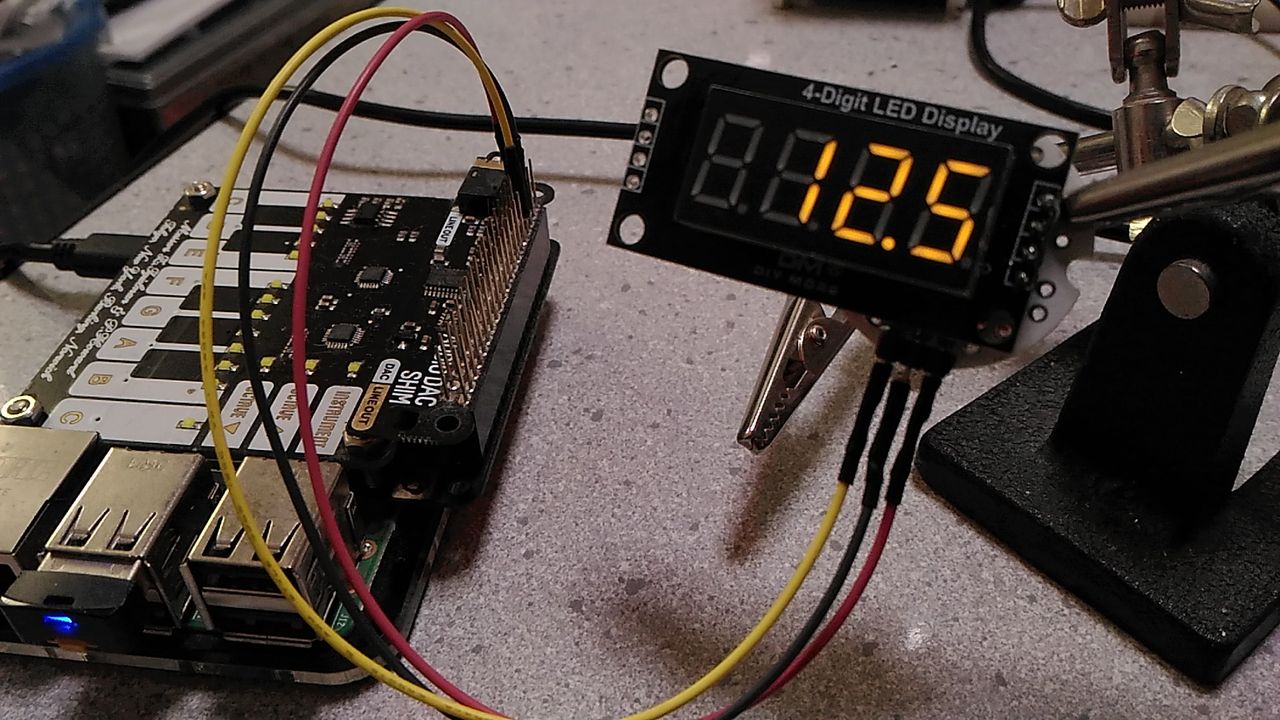
Vcc、GND、TXDの3線に簡素化できました。12.5[LF]のように送信すると、数値が表示されます。
Raspberry Pi からの給電は3.3Vにしています。TM1637は3.3Vでも動作可能です。
■ATTinyCore (2022/02/23追記)
標準のArduino-AVR用のコアパッケージを使ってビルドすると、通信速度が実質4800bpsが限界で、それ以上早くすると文字化けを起こしてしまいました。
そこで、ATtiny25、45、85チップに最適化されたArduinoコア・パッケージ、ATTinyCoreをインストールしてビルドしなおします。
結論から言うと、実質28800bps、標準パッケージの6倍の速度まで高速化できました。
Ref.SpenceKonde/ATTinyCore
まずは、gitHub からATTinyCoreパッケージをダウンロードします
$ cd ~/ATtiny85
$ git clone https://github.com/SpenceKonde/ATTinyCore.git
ATTinyCoreパッケージをPlatformIOの関連ディレクトリーにコピーします
$ cp -rp ./ATTinyCore/avr/cores/tiny ~/.platformio/packages/framework-arduino-avr/cores
$ mkdir -p ~/.platformio/packages/framework-arduino-avr/libraries/__cores__/tiny
$ cp -rp ./ATTinyCore/avr/libraries/* ~/.platformio/packages/framework-arduino-avr/libraries/__cores__/tiny
$ cp -rp ./ATTinyCore/avr/variants/* ~/.platformio/packages/framework-arduino-avr/variants
boards.txt の末尾にボード情報を追加します。
$ vi ~/.platformio/packages/framework-arduino-avr/boards.txt
attinyx5.name=ATtiny25/45/85
attinyx5.upload.maximum_size=8192
attinyx5.upload.maximum_data_size=512
attinyx5.upload.tool=avrdude
attinyx5.bootloader.tool=avrdude
attinyx5.bootloader.unlock_bits=0xFF
attinyx5.bootloader.lock_bits=0xFF
attinyx5.bootloader.extended_fuses=0xFF
attinyx5.build.core=tiny
attinyx5.build.board=AVR_ATTINYX5
attinyx5.build.variant=tinyX5
attiny85 のボード情報をコピーして、クロック数を8MHzに設定します
$ pushd ~/.platformio/platforms/atmelavr/boards
$ cp attiny85.json attiny85x.json
$ vi attiny85x.json
{
"build": {
"core": "tiny",
"extra_flags": "-DARDUINO_ARCH_AVR -DARDUINO_AVR_ATTINY85",
"f_cpu": "8000000L",
"mcu": "attiny85",
"variant": "tinyX5"
},
$ popd
platformio.ini のAttiny85 情報をファイル内でコピー&ペーストして、ボード情報を編集します
$ vi ~/ATtiny85/platformio.ini
[env:attiny85]
board = attiny85
board_build.f_cpu = 1000000L
.....
[env:attiny85x]
board = attiny85x
board_build.f_cpu = 8000000L
.....
$ vi src/uart.ino
#include <SoftwareSerial.h>
SoftwareSerial mySerial(1, 0); // RX, TX
void setup() {
mySerial.begin(38400);
}
void loop() {
while (mySerial.available()) {
mySerial.write(mySerial.read());
delay(50);
}
}
57600bpsまで設定可能ですが、今回は38400bpsに設定しています。
$ pio run -t upload -e attiny85x
ATtiny85は工場出荷時、クロックの8分周が有効になっているので、ここで、フューズビットを変更して無効にします。
$ ~/.platformio/packages/tool-avrdude/bin/avrdude -C ~/.platformio/packages/tool-avrdude/avrdude.conf -p attiny85 -P /dev/ttyUSB0 -b 9600 -c avrisp -U lfuse:w:0xe2:m
コードを焼き付けたチップを、ATtiny開発ボードに挿して、ラズベリーパイにUART接続します。
(ATtiny開発ボード) → Raspberry Pi Zero 小道具
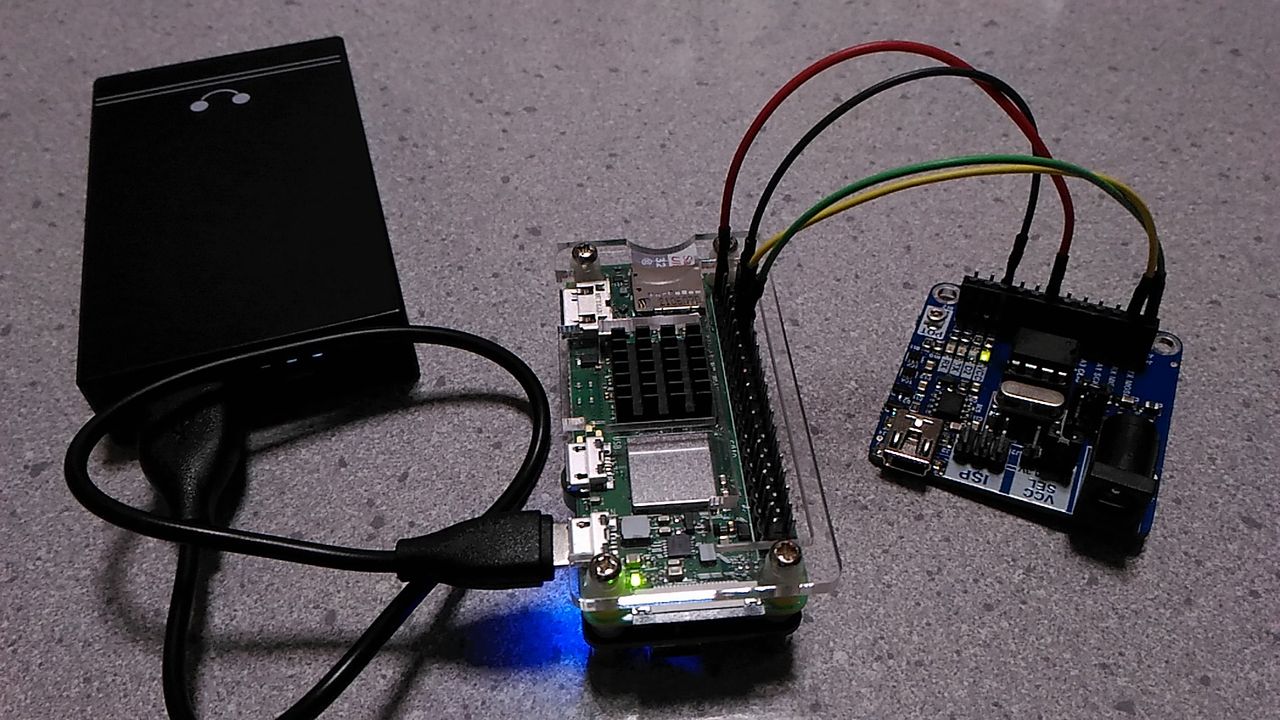
$ pio device monitor -p /dev/ttyUSB0 -b 19200
12345
mySerial.begin(38400)で設定した通信速度の半値をボーレートに指定して、デバイスモニターを起動すると、文字化けせずに通信できました。
※実際には、ATtiny85(57600)←→(28800)Raspberry Pi までは文字化けせずに通信できます。
◇補足:外部クロックの利用
今回はピン数が足りないので、外部クロックは使用しませんが、ATTINY85の内蔵クロックは精度が悪く、高速なシリアル通信が行えません。
ローヒューズの第3~0ビットは"0010"で、OSCCAL(発振校正レジスタ)値による較正の設定になっています。
外部8MHz晶発振子を使用する際には、ローヒューズの第3~0ビットを外付け水晶振動子設定の"1110"に変更します。
0x62(0b01100010) → 0xEE(0b11101110)に変更します。
$ ~/.platformio/packages/tool-avrdude/avrdude -C ~/.platformio/packages/tool-avrdude/avrdude.conf -p attiny85 -P /dev/ttyUSB0 -b 9600 -c avrisp -U lfuse:w:0b11101110:m
Avrdude: safemode: Fuses OK (E:FF, H:DF, L:EE)
■参考文献
・TM1637 データシート
・I2Cライクな7セグメントLEDドライバ TM1637
・USI Serial Library for ATtiny85
|
 Raspberry Pi(ラズベリー パイ)は、ARMプロセッサを搭載したシングルボードコンピュータ。イギリスのラズベリーパイ財団によって開発されている。
Raspberry Pi(ラズベリー パイ)は、ARMプロセッサを搭載したシングルボードコンピュータ。イギリスのラズベリーパイ財団によって開発されている。

 KEYESTUDIO Micro:bit V2ロボットスターターキット (マイクロビットなし) MakecodeとPython用
KEYESTUDIO Micro:bit V2ロボットスターターキット (マイクロビットなし) MakecodeとPython用
動き、光と音の使い方、障害物の検知と回避方法、線をたどり、IRリモコンとアプリでコントロールする方法を学びます。
 Maqueen Lite V5 micro:bit ロボットキット STEM用(ライントレース&障害物回避)
Maqueen Lite V5 micro:bit ロボットキット STEM用(ライントレース&障害物回避)
Maqueen Lite V5 STEMロボットは、事前調整済みのライントレースアルゴリズム、耐衝撃モーター、開封即使用可能な設計で、ストレスを解消します。
 たいていのことは100日あれば、うまくいく。長田英知著
たいていのことは100日あれば、うまくいく。長田英知著
「時間がなくて、なかなか自分のやりたいことができない」
「一念発起して何かを始めても、いつも三日坊主で終わってしまう」
「色んなことを先延ばしにしたまま、時間だけが過ぎていく」
そこで本書では、そんな著者が独自に開発した、
まったく新しい目標達成メソッド「100日デザイン」について、
その知識と技術を、余すところなくご紹介します。
 まんがで納得ナポレオン・ヒル 思考は現実化する
まんがで納得ナポレオン・ヒル 思考は現実化する
OLとして雑務をこなす日々に飽き足らず、科学者だった父が残した薬品を商品化すべく、起業を決意した内山麻由(27)。彼女はセミナーで知り合った謎の女性からサポートを得ながら、彼女と二人三脚でナポレオン・ヒルの成功哲学を実践し、さまざまな問題を乗り越えていく。
ヒル博士の<ゴールデンルール>に従い、仕事に、恋に全力疾走する彼女の、成功への物語。
 今日は人生最悪で最高の日 1秒で世界を変えるたったひとつの方法 ひすいこたろう著
今日は人生最悪で最高の日 1秒で世界を変えるたったひとつの方法 ひすいこたろう著
偉人の伝記を読むと、最悪な日は、不幸な日ではなく、新しい自分が始まる日であることがわかります。最悪な出来事は、自分の人生が、想像を超えて面白くなる兆しなのです。偉人伝を読むことで、このときの不幸があったおかげで、未来にこういう幸せがくるのかと、人生を俯瞰する視線が立ち上がるのです。
 ご飯は私を裏切らない heisoku著
ご飯は私を裏切らない heisoku著
辛い現実から目を背けて食べるご飯は、いつも美味しく幸せを届けてくれる。
29歳、中卒、恋人いない歴イコール年齢。バイト以外の職歴もなく、短期バイトを転々とする日々。ぐるぐると思索に耽るけど、ご飯を食べると幸せになれる。奇才の新鋭・heisokuが贈るリアル労働グルメ物語!
 【最新版Gemini 3に対応!】できるGemini (できるシリーズ)
【最新版Gemini 3に対応!】できるGemini (できるシリーズ)
Geminiを「最強の知的生産パートナー」として使いこなすための、実践的なノウハウを凝縮した一冊です。
基本的な操作方法から、具体的なビジネスシーンでの活用、日々の業務を自動化するGoogle Workspaceとの連携、さらには自分だけのオリジナルAIを作成する方法まで余すところなく解説します。
 Rustプログラミング完全ガイド 他言語との比較で違いが分かる!
Rustプログラミング完全ガイド 他言語との比較で違いが分かる!
Rustの各手法や考え方を幅広く解説!
500以上のサンプルを掲載。実行結果も確認。
全24章の包括的なチュートリアル。
 ポチらせる文章術
ポチらせる文章術
販売サイト・ネット広告・メルマガ・ブログ・ホームページ・SNS…
全WEB媒体で効果バツグン!
カリスマコピーライターが教える「見てもらう」「買ってもらう」「共感してもらう」すべてに効くネット文章術
 小型で便利な Type-C アダプター USB C オス - USB3.1 オスアダプター
小型で便利な Type-C アダプター USB C オス - USB3.1 オスアダプター
Type-C端子のマイコンボードをこのアダプタを介して直接Raspberry Piに挿すことができます。ケーブルなしで便利なツールです。
 Divoom Ditoo Pro ワイヤレススピーカー
Divoom Ditoo Pro ワイヤレススピーカー
15W高音質重低音/青軸キーボード/Bluetooth5.3/ピクセルアート 専用アプリ/USB接続/microSDカード
 電源供給USBケーブル スリム 【5本セット】
電源供給USBケーブル スリム 【5本セット】
USB電源ケーブル 5V DC電源供給ケーブル スリム 【5本セット】 電源供給 バッテリー 修理 自作 DIY 電子工作 (100cm)
|