OTA (ESP32 Over The Air)
2024.02.23
YouTube でも紹介しています。画像をクリックすると再生できます。
今回は、ESP32 OTA(Over The Air)機能を使ってみます。
OTAアップデートメカニズムを使用すると、プログラム実行中に、Wi-FiやBluetooth経由でプログラムを更新することができます。
まずは、OTA機能に利用されるパーティション定義についてみてみます。
ここでは、PlatformIOを開発環境に用いて、OTA機能を実装していきます。
 Arduino開発環境構築 PlatformIO
Arduino開発環境構築 PlatformIO
$ cd ~/.platformio/packages/framework-arduinoespressif32/tools/partitions
$ ls -1 *.csv
app3M_fat9M_16MB.csv
bare_minimum_2MB.csv
default.csv
default_16MB.csv
default_8MB.csv
default_ffat.csv
ffat.csv
huge_app.csv
large_spiffs_16MB.csv
max_app_8MB.csv
min_spiffs.csv
minimal.csv
no_ota.csv
noota_3g.csv
noota_3gffat.csv
noota_ffat.csv
rainmaker.csv
$ cat default.csv
# Name, Type, SubType, Offset, Size, Flags
nvs, data, nvs, 0x9000, 0x5000,
otadata, data, ota, 0xe000, 0x2000,
app0, app, ota_0, 0x10000, 0x140000,
app1, app, ota_1, 0x150000,0x140000,
spiffs, data, spiffs, 0x290000,0x160000,
coredump, data, coredump,0x3F0000,0x10000,
標準的なESPRESSIF ESP32には、4MBのフラッシュメモリが搭載されています。
この4MBの領域用にデフォルトのパーティション・テーブルが定義されています。
このパーティションテーブルではOTA機能を利用できるように設定されています。
OTAでは、少なくとも2 つのOTAアプリ・ パーティションと1 つのOTA データ パーティションを使用してデバイスのパーティション テーブルが構成されています。
通常のプログラムあるいはOTA機能を持つプログラムを初めて書き込む際にはota_0に書き込まれます。
アプリの状態はotadataパーティションで管理され、カウンター情報を更新します。
カウンターはOTAアプリ・パーティション(ota_0, ota_1,...) へのポインターで、起動アプリとしてカウンター0、つまりota_0がセットされます。
次にOTA機能を持つプログラムから更新プログラムが読み込まれると、新しいプログラムは現在起動用に選択されていないOTAアプリ・パーティションota_1に書き込まれます。
更新用プログラムが検証されると、OTAデータ・パーティションが更新され、ota_1が次回起動用に指定されます。
さらに次にプログラムが更新されるときには、ota_0アプリ・パーティションが上書きされます。
また、ota_1のプログラム実行中に予期せぬエラーが発生すると、ota_0のプログラムにロールバックされます。
詳細を知りたい方は下記のドキュメントをご覧ください。
Over The Air Updates (OTA)
| Name |
便宜上の名称(16文字以内)です。機能上の意味はありません。
|
| Type |
一般的に使われるのは app とdata の2種類です。 |
| SubType |
Typeが app の場合、factory(0x00),ota_0~ota_15,testのいづれかを指定します。
| nvs |
WiFiデータ、デバイスPHYキャリブレーションデータなど不揮発性メモリに保存するデータを格納ために使用します。
Non-Volatile Storage Library
|
| ota (data) |
OTA管理情報格納領域 |
| ota_0~15(app) |
アプリケーション格納領域 |
| spiffs |
SPI Flash File System。
フラッシュメモリの一部をストレージとして使うことができます。 |
| coredump |
コアダンプをメモリに格納するために使用します。
アプリケーションがクラッシュした際の解析に使用できます。 |
|
| Offset |
領域の開始アドレスです。 |
| Size |
領域のサイズ指定です。Type=appの場合、最小ブロックサイズは64K(0x10000)の倍数で指定します。 |
詳細は下記が参考になります。
ESP32のPartition Tableの書き方
まずは、PlatformIOを開発環境に用いて未指定でビルドしてみます。
Arduino開発環境構築 PlatformIO
$ pio run
Advanced Memory Usage is available via "PlatformIO Home > Project Inspect"
RAM: [ ] 4.3% (used 22864 bytes from 532480 bytes)
Flash: [== ] 22.3% (used 292149 bytes from 1310720 bytes)
プログラムに利用可能なFlashメモリーは 1310720バイトで、その内の292149バイトを使っていて、
ota_0のパーティションサイズ 0x140000 = 1310720バイトに一致しています。
もうちょっとプログラム領域を大きくしたい場合には、SPIファイルシステム領域を減らした min_spiffs.csv が用意されています。
$ cat min_spiffs.csv
# Name, Type, SubType, Offset, Size, Flags
nvs, data, nvs, 0x9000, 0x5000,
otadata, data, ota, 0xe000, 0x2000,
app0, app, ota_0, 0x10000, 0x1E0000,
app1, app, ota_1, 0x1F0000,0x1E0000,
spiffs, data, spiffs, 0x3D0000,0x20000,
coredump, data, coredump,0x3F0000,0x10000,
設定ファイルにパーティションテーブルを追記します。
$ vi platformio.ini
board_build.partitions = min_spiffs.csv
$ pio run
RAM: [ ] 4.3% (used 22864 bytes from 532480 bytes)
Flash: [= ] 14.9% (used 292149 bytes from 1966080 bytes)
OTA機能は利用せず、大きなプログラム領域を確保したい場合には、huge_app.csv があります。
この場合、OTAアプリパーティションは1つしか存在しません。
$ cat huge_app.csv
# Name, Type, SubType, Offset, Size, Flags
nvs, data, nvs, 0x9000, 0x5000,
otadata, data, ota, 0xe000, 0x2000,
app0, app, ota_0, 0x10000, 0x300000,
spiffs, data, spiffs, 0x310000,0xE0000,
coredump, data, coredump,0x3F0000,0x10000,
RAM: [ ] 4.3% (used 22864 bytes from 532480 bytes)
Flash: [= ] 9.3% (used 292149 bytes from 3145728 bytes)
FeatherS2 (ESP32-S2)のように、16MB SPI Flash、8MB Extra PSRAM を持つようなマイコンでは、
default_16MB.csv も利用できます。
$ cat default_16MB.csv
# Name, Type, SubType, Offset, Size, Flags
nvs, data, nvs, 0x9000, 0x5000,
otadata, data, ota, 0xe000, 0x2000,
app0, app, ota_0, 0x10000, 0x640000,
app1, app, ota_1, 0x650000,0x640000,
spiffs, data, spiffs, 0xc90000,0x360000,
coredump, data, coredump,0xFF0000,0x10000,
RAM: [= ] 8.5% (used 27756 bytes from 327680 bytes)
Flash: [ ] 4.2% (used 273582 bytes from 6553600 bytes)
●OTA機能の実装
OTA機能を実装するプログラムはひな形が公開されています。
BasicOTA
これをベースに各種変更を行います。
#include <WiFi.h>
#include <ArduinoOTA.h>
#define SECRET_SSID "xxxxxxxxxx"
#define SECRET_PASS "xxxxxxxxxx"
const uint8_t PRIMARY_DNS[4] = {192,168,11,1};
const uint8_t GATEWAY[4] = {192,168,11,1};
const uint8_t SUBNETMASK[4] = {255,255,255,0};
const uint8_t LOCAL_IP[4] = {192,168,11,62};
#define TELNET_PORT (23)
WiFiServer server(TELNET_PORT);
#include "Debug.h"
Debug debug;
void setup()
{
if (!WiFi.config(LOCAL_IP, GATEWAY, SUBNETMASK, PRIMARY_DNS)) while(1);
// WiFi STA設定
WiFi.mode(WIFI_STA);
WiFi.begin(SECRET_SSID, SECRET_PASS); // Connect to WPA/WPA2 network
while (WiFi.status() != WL_CONNECTED) delay(100);
server.begin();
debug.begin(NULL,NULL,&server);
// OTA設定
ArduinoOTA
.onStart([]() {
String type;
if (ArduinoOTA.getCommand() == U_FLASH)
type = "sketch";
else // U_SPIFFS
type = "filesystem";
debug.print("Start updating %s\n",type);
})
.onEnd([]() {
debug.print("\nEnd");
})
.onProgress([](unsigned int progress, unsigned int total) {
debug.print("Progress: %u%%\r", (progress / (total / 100)));
})
.onError([](ota_error_t error) {
debug.print("Error[%u]: ", error);
if (error == OTA_AUTH_ERROR) debug.print("Auth Failed\n");
else if (error == OTA_BEGIN_ERROR) debug.print("Begin Failed\n");
else if (error == OTA_CONNECT_ERROR) debug.print("Connect Failed\n");
else if (error == OTA_RECEIVE_ERROR) debug.print("Receive Failed\n");
else if (error == OTA_END_ERROR) debug.print("End Failed\n");
});
ArduinoOTA.begin();
//=============================================
// 初期化コードを書く
//=============================================
}
void loop()
{
ArduinoOTA.handle();
//=============================================
// 処理コードを書く
//=============================================
}
●少しだけ解説
ローカルIPアドレスの設定
#define SECRET_SSID "xxxxxxxxxx"
#define SECRET_PASS "xxxxxxxxxx"
const uint8_t PRIMARY_DNS[4] = {192,168,11,1};
const uint8_t GATEWAY[4] = {192,168,11,1};
const uint8_t SUBNETMASK[4] = {255,255,255,0};
const uint8_t LOCAL_IP[4] = {192,168,11,62};
ブロードバンドルーター経由で固定IPアドレスを持つLAN内のマイコンボードにアクセスできるようにします。
上記はBUFFALOのルーターを例にして、マイコンのアドレスを192.168.11.62にしています。
Telnetによるメッセージ表示
#define TELNET_PORT (23)
WiFiServer server(TELNET_PORT);
マイコンのプログラムをリモートで更新できるようにしているにも関わらず、シリアル接続してメッセージを表示させるのでは意味がありません。
そこで、パソコン上のTeraTermにメッセージを表示できるようにします。
TeraTermでは、UDP送受信をサポートしていないため、TCP(Telnet:23番)を使います。
OTAアップデートでは、ポート番号:3232が利用されるので競合することはありませんが、OTAポートを指定する場合は、ArduinoOTA.setPort()を使います。
Telnet送受信用クラス
#include "Debug.h"
Debug debug;
うぷ主が独自に作成したクラスです。TeraTermとの送受信に使います。
WiFi各種設定
if (!WiFi.config(LOCAL_IP, GATEWAY, SUBNETMASK, PRIMARY_DNS)) while(1);
マイコンの固定IPアドレスを指定しています。
WiFi.mode(WIFI_STA);
WiFiにステーションモードを指定しています。
WiFi.begin(SECRET_SSID, SECRET_PASS);
while (WiFi.status() != WL_CONNECTED) delay(100);
ブロードバンドルーターに接続します。
server.begin();
Telnet用にサーバを起動します。
debug.print();
client.print()の拡張です。クライアントにメッセージを送信します。
接続が断たれているときは、接続を待ちネゴシエーション処理後に送信します。
プログラムのアップロード
OTAプログラムは初回書き込み時のみUSB接続して、コードをマイコンに書き込みます。
upload_port = /dev/ttyACM0
OTA機能の動作確認用にちょっとした回路を組んでみます。
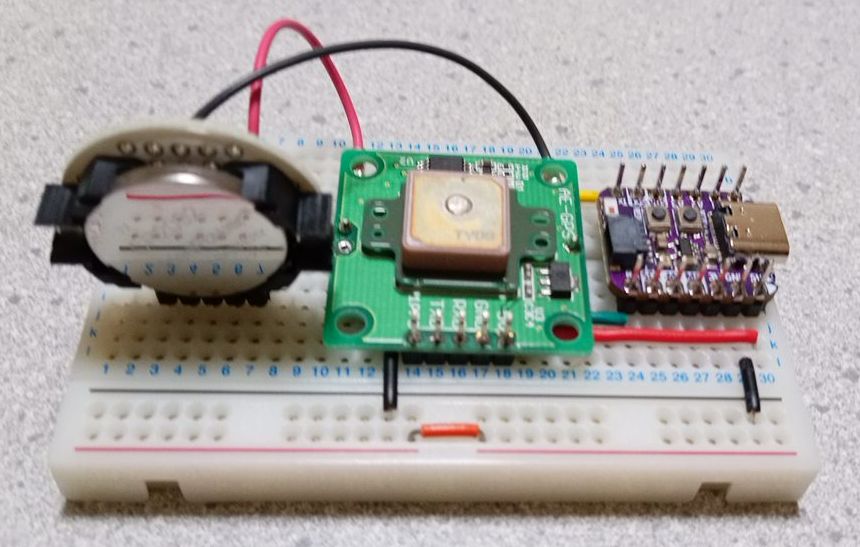
右側のQT Py ESP32-S2 にGPSモジュールをつなげて、位置情報を送信して、パソコン側のTeraTermで受信しています。
WiFi経由でプログラムをアップロードする際には、USB接続をコメントアウトして、IPアドレスを指定します。
;upload_port = /dev/ttyACM0
upload_protocol = espota
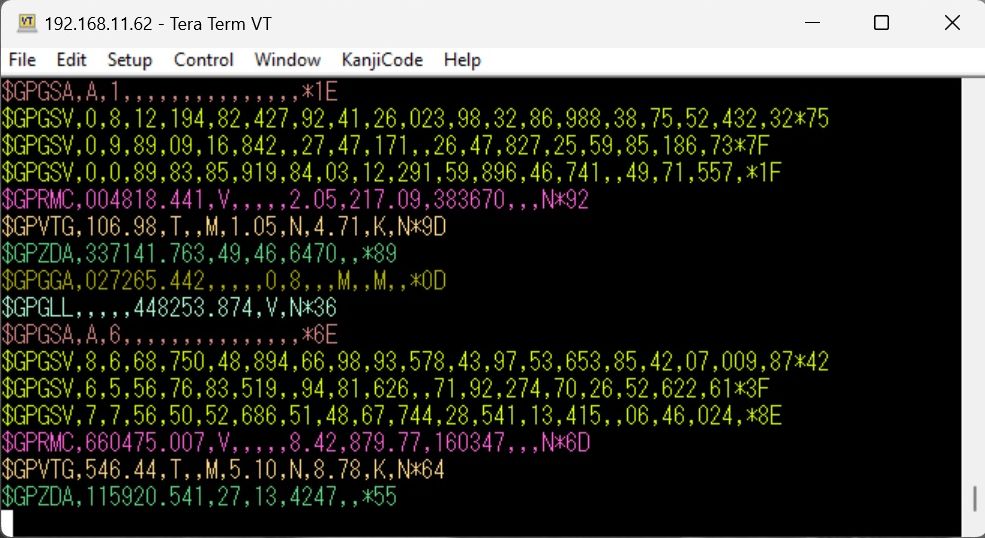
upload_port = 192.168.11.62
$ pio run -t upload
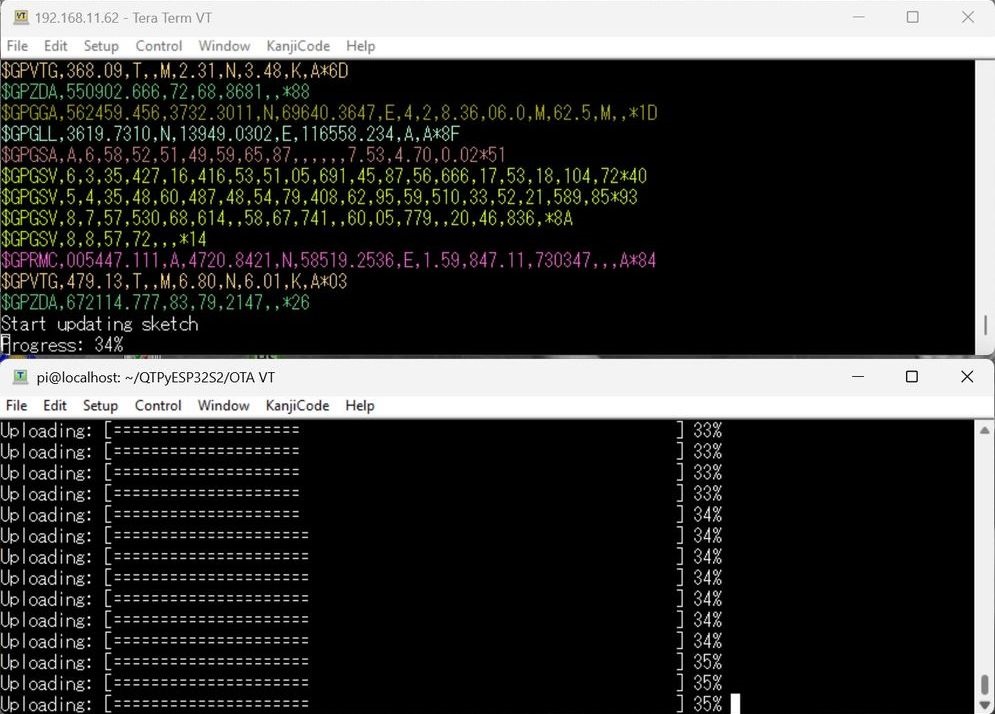
上段のTeraTerm画面がGPS情報表示、下段がRaspberry Piのビルド画面です。
プログラムの遠隔更新がはじまると現在のプロセスが中断され、OTA機能が実施されます。
Start updating sketch
Progress: 34%
上段のGPS情報表示では、更新プログラムのアップロード状況を表示するようにしてあります。
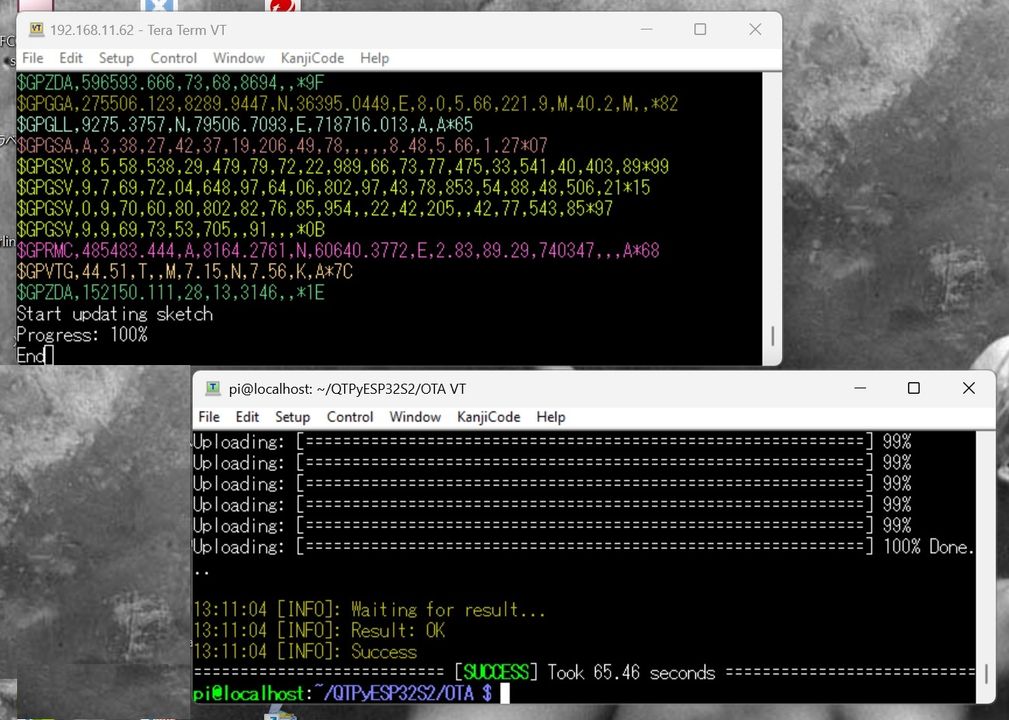
アップロードが完了すると自動リセットが掛かり更新プログラムに切り替わります。
GPS情報を表示しているTeraTermもセッションが切断されるので、再接続します。
●参考文献
・SPI Flash Modes
・ESP8266(ESP-WROOM-02)で、OTA使いながら、UDP(もといOSC)で送受信できるようにするテスト
・TCPとUDPの違いとは?~Ethernet接続におけるオーバーヘッド削減ノウハウ~
|
 Raspberry Pi(ラズベリー パイ)は、ARMプロセッサを搭載したシングルボードコンピュータ。イギリスのラズベリーパイ財団によって開発されている。
Raspberry Pi(ラズベリー パイ)は、ARMプロセッサを搭載したシングルボードコンピュータ。イギリスのラズベリーパイ財団によって開発されている。
 KEYESTUDIO Micro:bit V2ロボットスターターキット (マイクロビットなし) MakecodeとPython用
KEYESTUDIO Micro:bit V2ロボットスターターキット (マイクロビットなし) MakecodeとPython用
動き、光と音の使い方、障害物の検知と回避方法、線をたどり、IRリモコンとアプリでコントロールする方法を学びます。
 Maqueen Lite V5 micro:bit ロボットキット STEM用(ライントレース&障害物回避)
Maqueen Lite V5 micro:bit ロボットキット STEM用(ライントレース&障害物回避)
Maqueen Lite V5 STEMロボットは、事前調整済みのライントレースアルゴリズム、耐衝撃モーター、開封即使用可能な設計で、ストレスを解消します。
 たいていのことは100日あれば、うまくいく。長田英知著
たいていのことは100日あれば、うまくいく。長田英知著
「時間がなくて、なかなか自分のやりたいことができない」
「一念発起して何かを始めても、いつも三日坊主で終わってしまう」
「色んなことを先延ばしにしたまま、時間だけが過ぎていく」
そこで本書では、そんな著者が独自に開発した、
まったく新しい目標達成メソッド「100日デザイン」について、
その知識と技術を、余すところなくご紹介します。
 まんがで納得ナポレオン・ヒル 思考は現実化する
まんがで納得ナポレオン・ヒル 思考は現実化する
OLとして雑務をこなす日々に飽き足らず、科学者だった父が残した薬品を商品化すべく、起業を決意した内山麻由(27)。彼女はセミナーで知り合った謎の女性からサポートを得ながら、彼女と二人三脚でナポレオン・ヒルの成功哲学を実践し、さまざまな問題を乗り越えていく。
ヒル博士の<ゴールデンルール>に従い、仕事に、恋に全力疾走する彼女の、成功への物語。
 今日は人生最悪で最高の日 1秒で世界を変えるたったひとつの方法 ひすいこたろう著
今日は人生最悪で最高の日 1秒で世界を変えるたったひとつの方法 ひすいこたろう著
偉人の伝記を読むと、最悪な日は、不幸な日ではなく、新しい自分が始まる日であることがわかります。最悪な出来事は、自分の人生が、想像を超えて面白くなる兆しなのです。偉人伝を読むことで、このときの不幸があったおかげで、未来にこういう幸せがくるのかと、人生を俯瞰する視線が立ち上がるのです。
 ご飯は私を裏切らない heisoku著
ご飯は私を裏切らない heisoku著
辛い現実から目を背けて食べるご飯は、いつも美味しく幸せを届けてくれる。
29歳、中卒、恋人いない歴イコール年齢。バイト以外の職歴もなく、短期バイトを転々とする日々。ぐるぐると思索に耽るけど、ご飯を食べると幸せになれる。奇才の新鋭・heisokuが贈るリアル労働グルメ物語!
 【最新版Gemini 3に対応!】できるGemini (できるシリーズ)
【最新版Gemini 3に対応!】できるGemini (できるシリーズ)
Geminiを「最強の知的生産パートナー」として使いこなすための、実践的なノウハウを凝縮した一冊です。
基本的な操作方法から、具体的なビジネスシーンでの活用、日々の業務を自動化するGoogle Workspaceとの連携、さらには自分だけのオリジナルAIを作成する方法まで余すところなく解説します。
 Rustプログラミング完全ガイド 他言語との比較で違いが分かる!
Rustプログラミング完全ガイド 他言語との比較で違いが分かる!
Rustの各手法や考え方を幅広く解説!
500以上のサンプルを掲載。実行結果も確認。
全24章の包括的なチュートリアル。
 ポチらせる文章術
ポチらせる文章術
販売サイト・ネット広告・メルマガ・ブログ・ホームページ・SNS…
全WEB媒体で効果バツグン!
カリスマコピーライターが教える「見てもらう」「買ってもらう」「共感してもらう」すべてに効くネット文章術
 小型で便利な Type-C アダプター USB C オス - USB3.1 オスアダプター
小型で便利な Type-C アダプター USB C オス - USB3.1 オスアダプター
Type-C端子のマイコンボードをこのアダプタを介して直接Raspberry Piに挿すことができます。ケーブルなしで便利なツールです。
 Divoom Ditoo Pro ワイヤレススピーカー
Divoom Ditoo Pro ワイヤレススピーカー
15W高音質重低音/青軸キーボード/Bluetooth5.3/ピクセルアート 専用アプリ/USB接続/microSDカード
 電源供給USBケーブル スリム 【5本セット】
電源供給USBケーブル スリム 【5本セット】
USB電源ケーブル 5V DC電源供給ケーブル スリム 【5本セット】 電源供給 バッテリー 修理 自作 DIY 電子工作 (100cm)
|
