QRCode Scanner
2025.03.25

YouTube でも紹介しています。画像をクリックすると再生できます。
最近はQRコードを読込み、取得したURLにアクセスして各種申請をする機会が増えています。
スマホはカメラが付いているのでQRコードリーダーアプリをインスト―ルして簡単に読取ることができます。
また、Windows標準のカメラアプリにQRコードを読み取る機能があるので、WEBカメラを取付ければQRコードを取得できます。
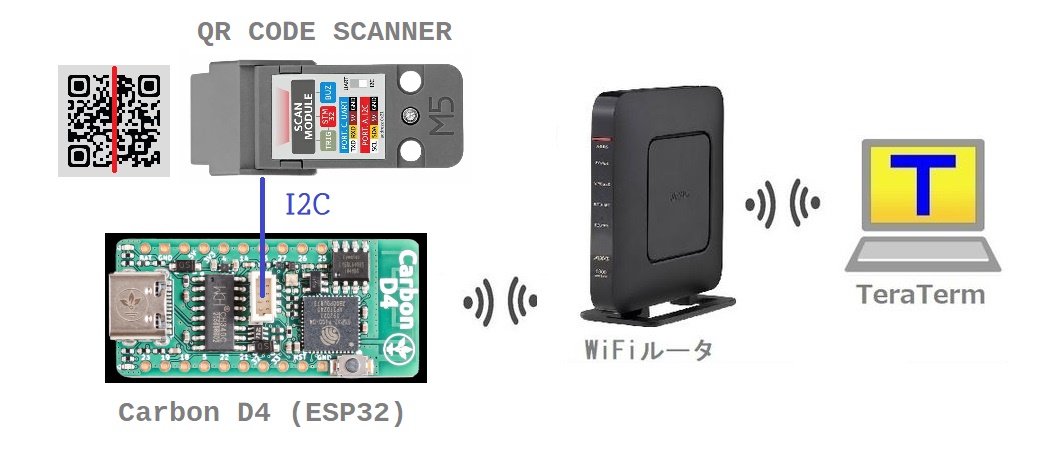
ESP32等のマイコンボードの場合は、M5STACK用I2Cバーコードスキャナーを利用することで簡単にQRコードを読取ることができます。
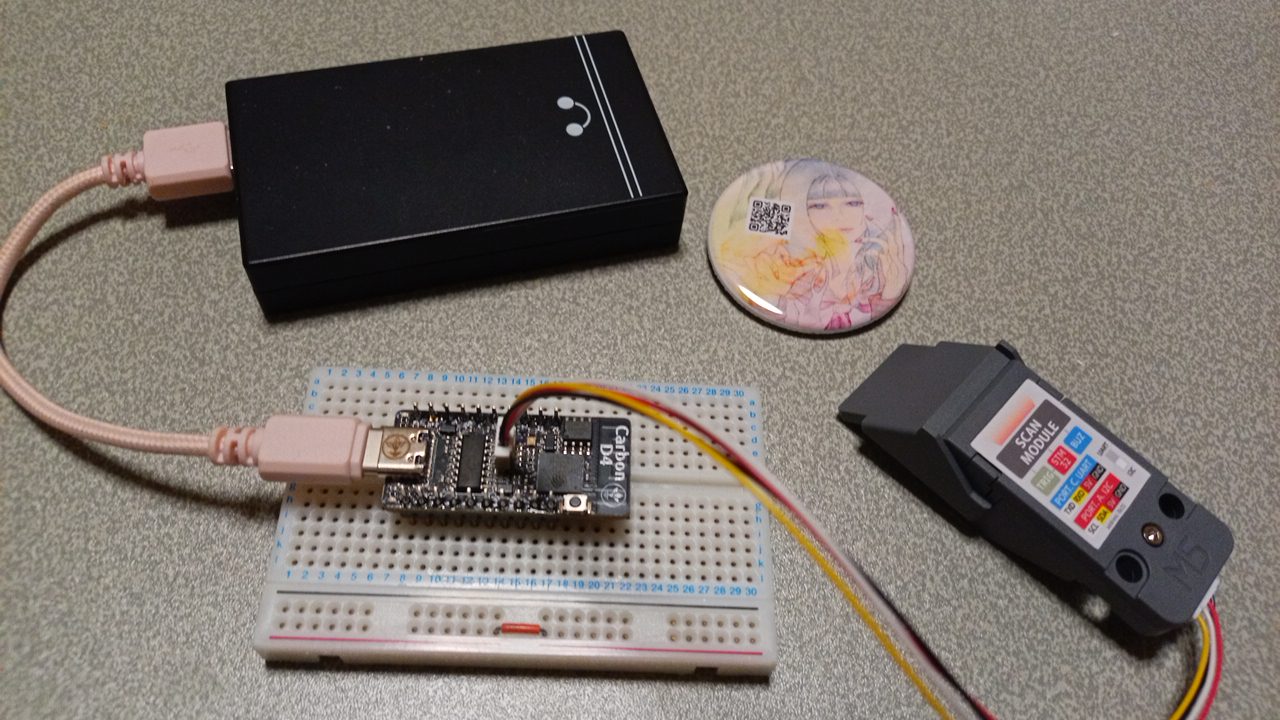
M5系マイコンボードはそのままGROVE接続すればよいのですが、ここではQROVE-QWIIC変換ケーブルを用いて、QWIICコネクタが実装されているマイコンボードを使っています。
構成図にあるように、WiFiルータ経由でパソコン上のTELNET端末にQRコードに含まれるURLを表示するようにしています。
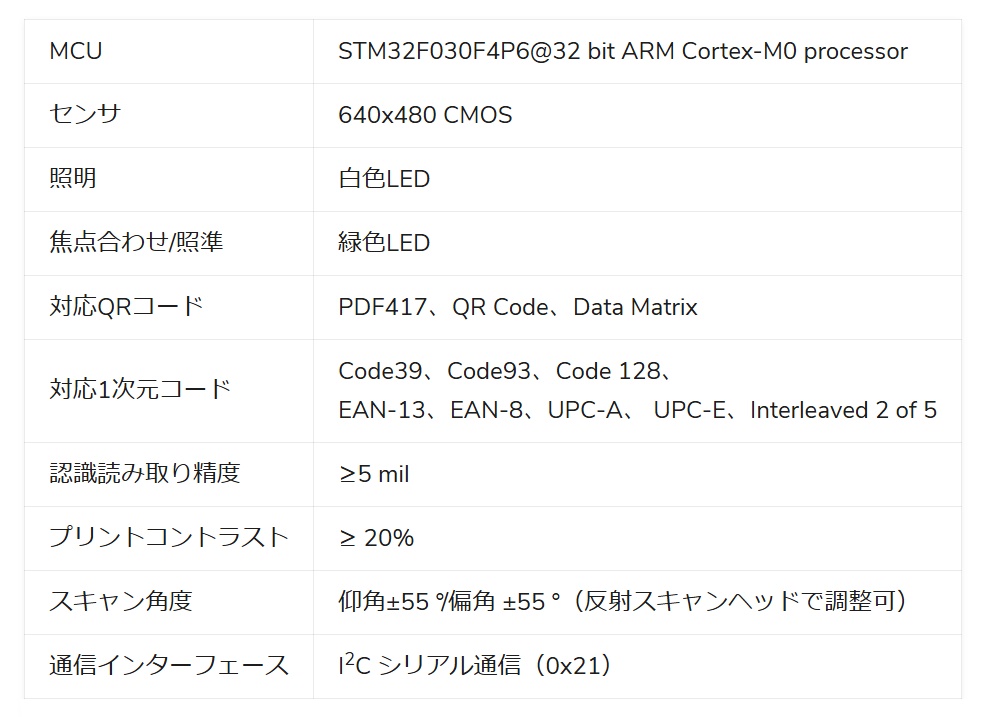
M5STACKからは数種類のバーコードスキャナーが販売されていますが、今回はスイッチ切替でI2CあるいはUART接続が可能な下記のUNIT QRCodeを使いました。

解像度 640 x 480のCMOS QR コードキャプチャエンジンとバス変換用MCU の STM32F030 を内蔵した 1次元/2次元コードスキャナーユニットです。通信インターフェースをトグルスイッチでI2C /UARTに切り替えられます。
2次元コード 3種類、1次元コード 8種類に対応、ファームウェアもアップグレード可能です。スキャントリガーボタン、ブザー、補助LED照明を搭載しており、焦点合わせ/照準の状態をブザーと緑色LEDで知らせます。
トリガーモードを連続/マニュアル動作にプログラミングで設定できます。 バーコードのスキャンが必要な物流業、小売業、製造業などの分野に向いています。

スライドスイッチで通信方式をI2C/UARTに切り替えることができます。今回はI2Cを使用します。

出力ポートがGROVEコネクタになっているので、GROVE-QWIIC変換ケーブルを使って、ESP32に接続します。

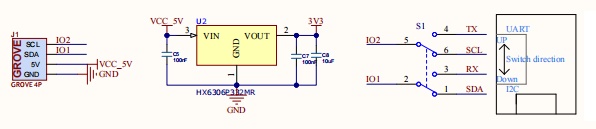
スキャナ・ユニットは内部で5Vから3.3Vに変換しているので、ESP32のQWIICコネクタ出力3.3Vをそのまま使用できます。
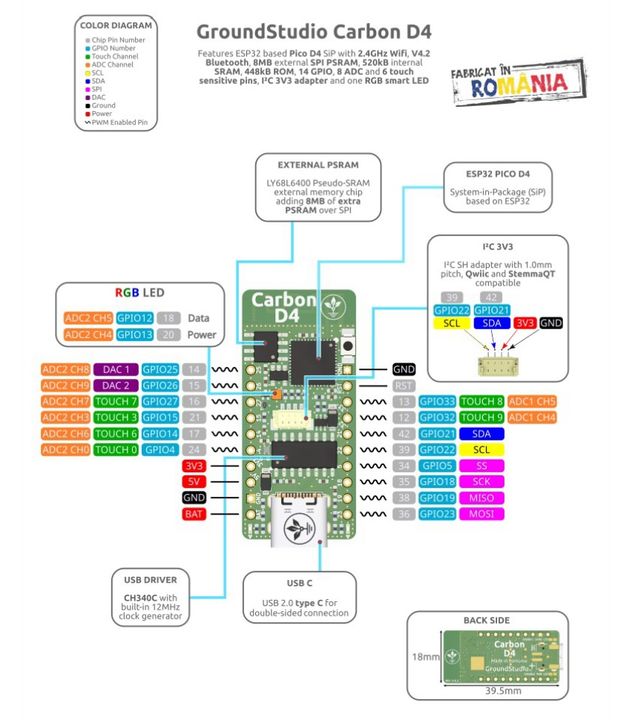
●GroundStudio Carbon D4
ESP32マイコンには、DigiKey Japanで特価販売されていたCarbon D4を用いています。
他にも、AdafruitやSparkfunのマイコンにはQWIICコネクタを持つ製品が販売されていますので探してみてください。
 Datasheet
Datasheet
GroundStudio/GroundStudio_Carbon_D4
ソースコードのビルドには、PlatformIOを使用しています。
Arduino開発環境構築 PlatformIO
CARBON D4に該当する設定ファイルがないので類似のボード設定を使用します。
$ pio init -b az-delivery-devkit-v4
$ vi platformio.ini
[env:az-delivery-devkit-v4]
platform = espressif32
board = az-delivery-devkit-v4
framework = arduino
platform_packages = framework-arduinoespressif32
monitor_speed = 115200
build_flags =
-DBOARD_HAS_PSRAM
-mfix-esp32-psram-cache-issue
●ソースコード
m5stack/M5Unit-QRCode
example / i2c_mode / i2c_mode.ino
M5STACKに依存している画像表示部分を削除し、TELNET通信用に改造しました。
#include <WiFi.h>
#include "telnet.h"
Telnet telnet;
#define TELNET_PORT (23)
WiFiServer server(TELNET_PORT);
const uint8_t PRIMARY_DNS[4] = {192,168,11,1};
const uint8_t GATEWAY[4] = {192,168,11,1};
const uint8_t SUBNETMASK[4] = {255,255,255,0};
const uint8_t LOCAL_IP[4] = {192,168,11,66};
#define SECRET_SSID "xxxxxxxxxxxx"
#define SECRET_PASS "xxxxxxxxxxxxx"
#include "M5UnitQRCode.h"
M5UnitQRCodeI2C qrcode;
void setup()
{
if (!WiFi.config(LOCAL_IP, GATEWAY, SUBNETMASK, PRIMARY_DNS)) while(1);
// WiFi STA設定
WiFi.mode(WIFI_STA);
WiFi.begin(SECRET_SSID, SECRET_PASS); // Connect to WPA/WPA2 network
while (WiFi.status() != WL_CONNECTED) delay(100);
server.begin();
telnet.begin(&server);
if (!telnet.connected()) delay(500);
Wire.begin();
while (!qrcode.begin(&Wire, UNIT_QRCODE_ADDR, 21, 22, 100000U)) {
telnet.print("Unit QRCode I2C Init Fail\n");
delay(1000);
}
telnet.print("Unit QRCode I2C Init Success\n");
telnet.print("Auto Scan Mode\n");
qrcode.setTriggerMode(MANUAL_SCAN_MODE);
}
void loop()
{
if (qrcode.getDecodeReadyStatus() == 1) {
uint8_t buffer[512] = {0};
uint16_t length = qrcode.getDecodeLength();
telnet.print("len:%d\r\n", length);
qrcode.getDecodeData(buffer, length);
telnet.print("decode data:");
for (int i = 0; i < length; i++) {
telnet.write(buffer[i]);
}
telnet.write(0x0a);
}
}
ESP32のローカルIPアドレスに192.168.11.66を設定しています。任意に変更してください。
telnet.h
#ifndef __TELNET_H
#define __TELNET_H
#include <WiFi.h>
#define DEBUG_BUF_SIZE 256
class Telnet
{
private:
WiFiServer *tnServer;
WiFiClient client;
char buf[DEBUG_BUF_SIZE];
unsigned char ch;
public:
Telnet();
~Telnet();
void begin(WiFiServer *tnserver);
void print(const char* format, ...);
void write(unsigned char ch);
boolean available();
boolean connected();
unsigned char read();
};
#endif /*__TELNET_H*/
telnet.cpp
#include "telnet.h"
Telnet::Telnet() {}
Telnet::~Telnet() {}
void Telnet::begin(WiFiServer *tnserver)
{
tnServer = tnserver;
unsigned char negotiation[25] = {
0xFF,0xFB,0x03, // IAC WILL suppress_go_ahead
0xFF,0xFD,0x01, // IAC DO echo
0xFF,0xFD,0x1F, // IAC DO window_size
0xFF,0xFB,0x05, // IAC WILL status
0xFF,0xFD,0x21, // IAC DO remote_flow_control
0xFF,0xFD,0x18, // IAC DO terminal_type
0xFF,0xFD,0x03, // IAC DO suppress_go_ahead
0xFF,0xFB,0x01, // IAC WILL echo
};
client = tnServer->available();
while(1) {
if(client) {
if (client.connected()) {
while (client.available()) client.read();
for(int i=0;i<24;++i) client.write(negotiation[i]);
while (client.available()) client.read();
return;
}
}
client = tnServer->available();
delay(100);
}
}
boolean Telnet::connected()
{
if (client && client.connected()) return true;
else return false;
}
boolean Telnet::available()
{
if (connected()) {
while (client.available()) {
ch = client.read();
if (ch==0xFF) {
ch = client.read();
switch(ch) {
case 0xF0:
break;
case 0xFA:
for(int i=0;i<5;++i) ch = client.read();
break;
default:
ch = client.read();
break;
}
return false;
} else {
return true;
}
}
}
return false;
}
void Telnet::print(const char* format, ...)
{
va_list args;
va_start(args, format);
vsprintf(buf,format,args);
va_end(args);
if (client.connected()) {
for (int len = 0; buf[len]; len++) client.write(buf[len]);
}
}
void Telnet::write(unsigned char uch)
{
client.write(uch);
}
unsigned char Telnet::read()
{
return ch;
}
src / M5UnitQRCode.h, M5UnitQRCodeI2C.h, M5UnitQRCodeI2C.cpp
クラスライブラリはM5STACKに依存していないので、そのまま使用します。
M5UnitQRCode.h
/*
* SPDX-FileCopyrightText: 2024 M5Stack Technology CO LTD
*
* SPDX-License-Identifier: MIT
*/
#ifndef _UNIT_QRCODE_H_
#define _UNIT_QRCODE_H_
#include "Arduino.h"
#include "Wire.h"
typedef enum {
AUTO_SCAN_MODE = 0,
MANUAL_SCAN_MODE = 1
} qrcode_scan_mode_t;
#include "M5UnitQRCodeI2C.h"
#endif
M5UnitQRCodeI2C.h
/*
* SPDX-FileCopyrightText: 2024 M5Stack Technology CO LTD
*
* SPDX-License-Identifier: MIT
*/
#ifndef _UNIT_QRCODE_I2C_H_
#define _UNIT_QRCODE_I2C_H_
#include "M5UnitQRCode.h"
#include "Arduino.h"
#include "Wire.h"
#define UNIT_QRCODE_ADDR 0x21
#define UNIT_QRCODE_TRIGGER_REG 0x0000
#define UNIT_QRCODE_READY_REG 0x0010
#define UNIT_QRCODE_LENGTH_REG 0x0020
#define UNIT_QRCODE_TRIGGER_MODE_REG 0x0030
#define UNIT_QRCODE_TRIGGER_KEY_REG 0x0040
#define UNIT_QRCODE_DATA_REG 0x1000
#define JUMP_TO_BOOTLOADER_REG 0x00FD
#define FIRMWARE_VERSION_REG 0x00FE
#define I2C_ADDRESS_REG 0x00FF
class M5UnitQRCodeI2C {
private:
uint8_t _addr;
TwoWire *_wire;
uint8_t _scl;
uint8_t _sda;
uint8_t _speed;
void writeBytes(uint8_t addr, uint16_t reg, uint8_t *buffer, uint8_t length);
void readBytes(uint8_t addr, uint16_t reg, uint8_t *buffer, uint16_t length);
public:
bool begin(TwoWire *wire = &Wire, uint8_t addr = UNIT_QRCODE_ADDR, uint8_t sda = 21, uint8_t scl = 22,
uint32_t speed = 100000L);
uint8_t getFirmwareVersion(void);
void jumpBootloader(void);
uint8_t setI2CAddress(uint8_t addr);
uint8_t getI2CAddress(void);
void setDecodeTrigger(bool en);
uint8_t getDecodeReadyStatus(void);
uint16_t getDecodeLength(void);
void getDecodeData(uint8_t *data, uint16_t len);
void setTriggerMode(qrcode_scan_mode_t mode);
uint8_t getTriggerMode(void);
uint8_t getTriggerKeyStatus(void);
};
#endif
M5UnitQRCodeI2C.cpp
/*
* SPDX-FileCopyrightText: 2024 M5Stack Technology CO LTD
*
* SPDX-License-Identifier: MIT
*/
#include "M5UnitQRCodeI2C.h"
void M5UnitQRCodeI2C::writeBytes(uint8_t addr, uint16_t reg, uint8_t *buffer, uint8_t length) {
uint8_t temp[2];
temp[0] = (reg & 0x00ff);
temp[1] = ((reg >> 8) & 0x00ff);
_wire->beginTransmission(addr);
_wire->write(temp[0]);
_wire->write(temp[1]);
for (int i = 0; i < length; i++) {
_wire->write(*(buffer + i));
}
_wire->endTransmission();
}
void M5UnitQRCodeI2C::readBytes(uint8_t addr, uint16_t reg, uint8_t *buffer, uint16_t length) {
uint8_t temp[2];
temp[0] = (reg & 0x00ff);
temp[1] = ((reg >> 8) & 0x00ff);
_wire->beginTransmission(addr);
_wire->write(temp[0]);
_wire->write(temp[1]);
_wire->endTransmission(false);
_wire->requestFrom(addr, length);
for (uint16_t i = 0; i < length; i++) {
buffer[i] = _wire->read();
}
}
bool M5UnitQRCodeI2C::begin(TwoWire *wire, uint8_t addr, uint8_t sda, uint8_t scl, uint32_t speed) {
_wire = wire;
_addr = addr;
_sda = sda;
_scl = scl;
_speed = speed;
_wire->begin(_sda, _scl, _speed);
delay(10);
_wire->beginTransmission(_addr);
uint8_t error = _wire->endTransmission();
if (error == 0) {
return true;
} else {
return false;
}
}
void M5UnitQRCodeI2C::setDecodeTrigger(bool en) {
writeBytes(_addr, UNIT_QRCODE_TRIGGER_REG, (uint8_t *)&en, 1);
}
void M5UnitQRCodeI2C::setTriggerMode(qrcode_scan_mode_t mode) {
writeBytes(_addr, UNIT_QRCODE_TRIGGER_MODE_REG, (uint8_t *)&mode, 1);
}
uint8_t M5UnitQRCodeI2C::getTriggerMode(void) {
uint8_t value = 0;
readBytes(_addr, UNIT_QRCODE_TRIGGER_MODE_REG, (uint8_t *)&value, 1);
return value;
}
uint8_t M5UnitQRCodeI2C::getDecodeReadyStatus(void) {
uint8_t value = 0;
readBytes(_addr, UNIT_QRCODE_READY_REG, (uint8_t *)&value, 1);
return value;
}
uint8_t M5UnitQRCodeI2C::getTriggerKeyStatus(void) {
uint8_t value = 0;
readBytes(_addr, UNIT_QRCODE_TRIGGER_KEY_REG, (uint8_t *)&value, 1);
return value;
}
uint16_t M5UnitQRCodeI2C::getDecodeLength(void) {
uint16_t value = 0;
readBytes(_addr, UNIT_QRCODE_LENGTH_REG, (uint8_t *)&value, 2);
return value;
}
void M5UnitQRCodeI2C::getDecodeData(uint8_t *data, uint16_t len) {
readBytes(_addr, UNIT_QRCODE_DATA_REG, data, len);
}
void M5UnitQRCodeI2C::jumpBootloader(void) {
uint8_t value = 1;
writeBytes(_addr, JUMP_TO_BOOTLOADER_REG, (uint8_t *)&value, 1);
}
uint8_t M5UnitQRCodeI2C::setI2CAddress(uint8_t addr) {
uint8_t temp[2] = {0};
temp[0] = I2C_ADDRESS_REG;
temp[1] = (I2C_ADDRESS_REG >> 8);
_wire->beginTransmission(_addr);
_wire->write(temp[0]);
_wire->write(temp[1]);
_wire->write(addr);
_wire->endTransmission();
_addr = addr;
return _addr;
}
uint8_t M5UnitQRCodeI2C::getI2CAddress(void) {
uint8_t temp[2] = {0};
temp[0] = I2C_ADDRESS_REG;
temp[1] = (I2C_ADDRESS_REG >> 8);
_wire->beginTransmission(_addr);
_wire->write(temp[0]);
_wire->write(temp[1]);
_wire->endTransmission();
uint8_t RegValue;
_wire->requestFrom(_addr, 1);
RegValue = Wire.read();
return RegValue;
}
uint8_t M5UnitQRCodeI2C::getFirmwareVersion(void) {
uint8_t temp[2] = {0};
temp[0] = FIRMWARE_VERSION_REG;
temp[1] = (FIRMWARE_VERSION_REG >> 8);
_wire->beginTransmission(_addr);
_wire->write(temp[0]);
_wire->write(temp[1]);
_wire->endTransmission();
uint8_t RegValue;
_wire->requestFrom(_addr, 1);
RegValue = Wire.read();
return RegValue;
}
●実行
TeraTermを起動して、TELNET接続します
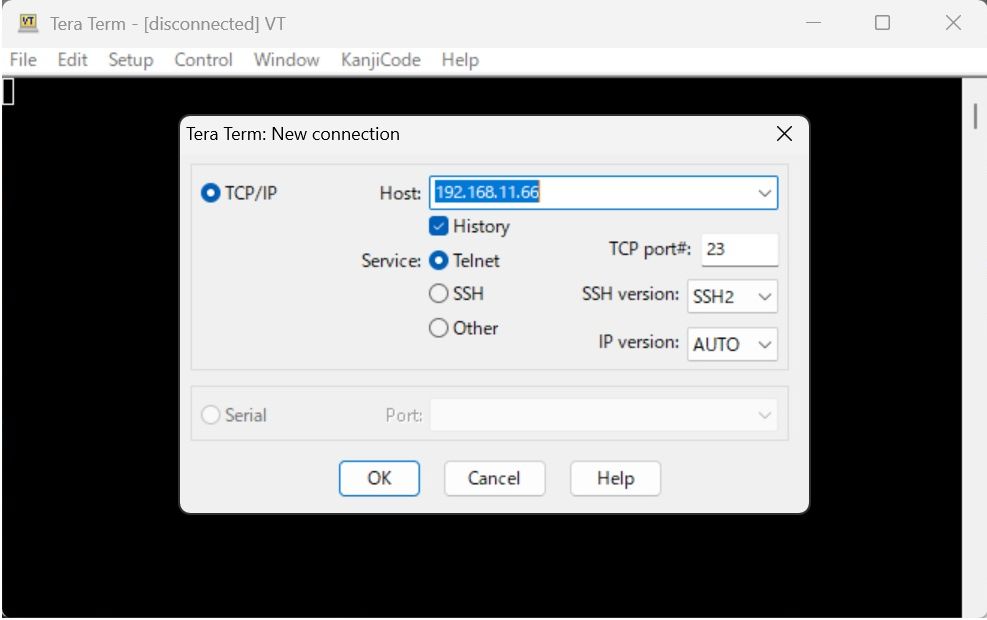
i2c_mode.ino でボードのIPアドレスを
const uint8_t LOCAL_IP[4] = {192,168,11,66};
に指定しています。
また、スキャンモードにマニュアルを指定しているので
qrcode.setTriggerMode(MANUAL_SCAN_MODE);
スキャナーをQRコードに向けて、トリガースイッチを押してスキャンします。
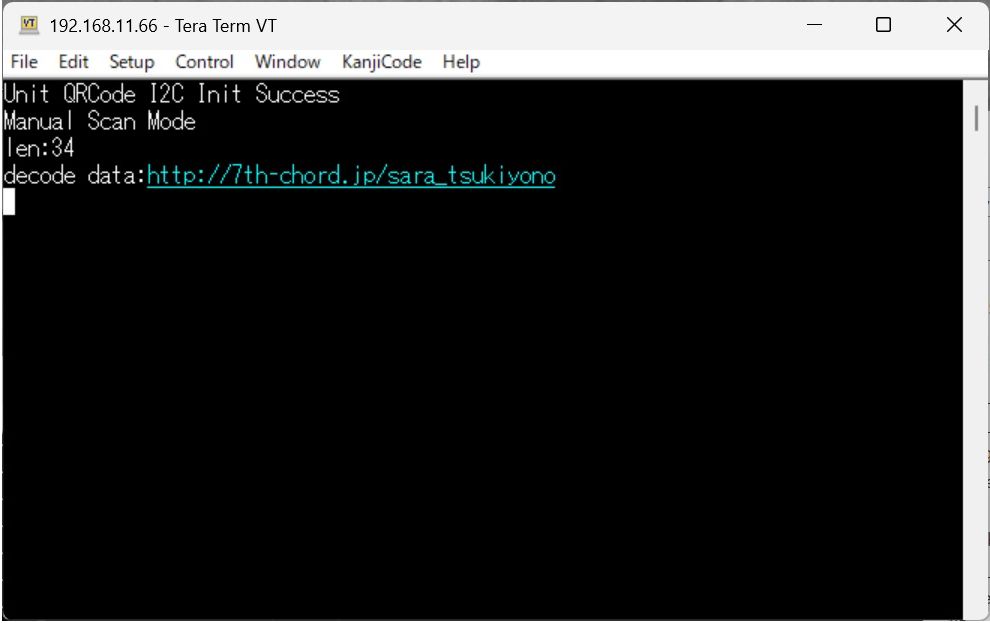
取得したURLをクライアント端末に表示しています。
|
 Raspberry Pi(ラズベリー パイ)は、ARMプロセッサを搭載したシングルボードコンピュータ。イギリスのラズベリーパイ財団によって開発されている。
Raspberry Pi(ラズベリー パイ)は、ARMプロセッサを搭載したシングルボードコンピュータ。イギリスのラズベリーパイ財団によって開発されている。
 KEYESTUDIO Micro:bit V2ロボットスターターキット (マイクロビットなし) MakecodeとPython用
KEYESTUDIO Micro:bit V2ロボットスターターキット (マイクロビットなし) MakecodeとPython用
動き、光と音の使い方、障害物の検知と回避方法、線をたどり、IRリモコンとアプリでコントロールする方法を学びます。
 Maqueen Lite V5 micro:bit ロボットキット STEM用(ライントレース&障害物回避)
Maqueen Lite V5 micro:bit ロボットキット STEM用(ライントレース&障害物回避)
Maqueen Lite V5 STEMロボットは、事前調整済みのライントレースアルゴリズム、耐衝撃モーター、開封即使用可能な設計で、ストレスを解消します。
 たいていのことは100日あれば、うまくいく。長田英知著
たいていのことは100日あれば、うまくいく。長田英知著
「時間がなくて、なかなか自分のやりたいことができない」
「一念発起して何かを始めても、いつも三日坊主で終わってしまう」
「色んなことを先延ばしにしたまま、時間だけが過ぎていく」
そこで本書では、そんな著者が独自に開発した、
まったく新しい目標達成メソッド「100日デザイン」について、
その知識と技術を、余すところなくご紹介します。
 まんがで納得ナポレオン・ヒル 思考は現実化する
まんがで納得ナポレオン・ヒル 思考は現実化する
OLとして雑務をこなす日々に飽き足らず、科学者だった父が残した薬品を商品化すべく、起業を決意した内山麻由(27)。彼女はセミナーで知り合った謎の女性からサポートを得ながら、彼女と二人三脚でナポレオン・ヒルの成功哲学を実践し、さまざまな問題を乗り越えていく。
ヒル博士の<ゴールデンルール>に従い、仕事に、恋に全力疾走する彼女の、成功への物語。
 今日は人生最悪で最高の日 1秒で世界を変えるたったひとつの方法 ひすいこたろう著
今日は人生最悪で最高の日 1秒で世界を変えるたったひとつの方法 ひすいこたろう著
偉人の伝記を読むと、最悪な日は、不幸な日ではなく、新しい自分が始まる日であることがわかります。最悪な出来事は、自分の人生が、想像を超えて面白くなる兆しなのです。偉人伝を読むことで、このときの不幸があったおかげで、未来にこういう幸せがくるのかと、人生を俯瞰する視線が立ち上がるのです。
 ご飯は私を裏切らない heisoku著
ご飯は私を裏切らない heisoku著
辛い現実から目を背けて食べるご飯は、いつも美味しく幸せを届けてくれる。
29歳、中卒、恋人いない歴イコール年齢。バイト以外の職歴もなく、短期バイトを転々とする日々。ぐるぐると思索に耽るけど、ご飯を食べると幸せになれる。奇才の新鋭・heisokuが贈るリアル労働グルメ物語!
 【最新版Gemini 3に対応!】できるGemini (できるシリーズ)
【最新版Gemini 3に対応!】できるGemini (できるシリーズ)
Geminiを「最強の知的生産パートナー」として使いこなすための、実践的なノウハウを凝縮した一冊です。
基本的な操作方法から、具体的なビジネスシーンでの活用、日々の業務を自動化するGoogle Workspaceとの連携、さらには自分だけのオリジナルAIを作成する方法まで余すところなく解説します。
 Rustプログラミング完全ガイド 他言語との比較で違いが分かる!
Rustプログラミング完全ガイド 他言語との比較で違いが分かる!
Rustの各手法や考え方を幅広く解説!
500以上のサンプルを掲載。実行結果も確認。
全24章の包括的なチュートリアル。
 ポチらせる文章術
ポチらせる文章術
販売サイト・ネット広告・メルマガ・ブログ・ホームページ・SNS…
全WEB媒体で効果バツグン!
カリスマコピーライターが教える「見てもらう」「買ってもらう」「共感してもらう」すべてに効くネット文章術
 小型で便利な Type-C アダプター USB C オス - USB3.1 オスアダプター
小型で便利な Type-C アダプター USB C オス - USB3.1 オスアダプター
Type-C端子のマイコンボードをこのアダプタを介して直接Raspberry Piに挿すことができます。ケーブルなしで便利なツールです。
 Divoom Ditoo Pro ワイヤレススピーカー
Divoom Ditoo Pro ワイヤレススピーカー
15W高音質重低音/青軸キーボード/Bluetooth5.3/ピクセルアート 専用アプリ/USB接続/microSDカード
 電源供給USBケーブル スリム 【5本セット】
電源供給USBケーブル スリム 【5本セット】
USB電源ケーブル 5V DC電源供給ケーブル スリム 【5本セット】 電源供給 バッテリー 修理 自作 DIY 電子工作 (100cm)
|
