USB TERMAL PRINTER

2026.04.17
今回はUSBサーマルプリンタをマイコンから制御します。
TTLサーマルプリンタであれば、単にシリアル接続すれば済むのですが、
USBプリンタでは、USBシリアル変換モジュールを挟めば済むというものではありません。
USB HOST機能を有するESP32-S3から制御します。

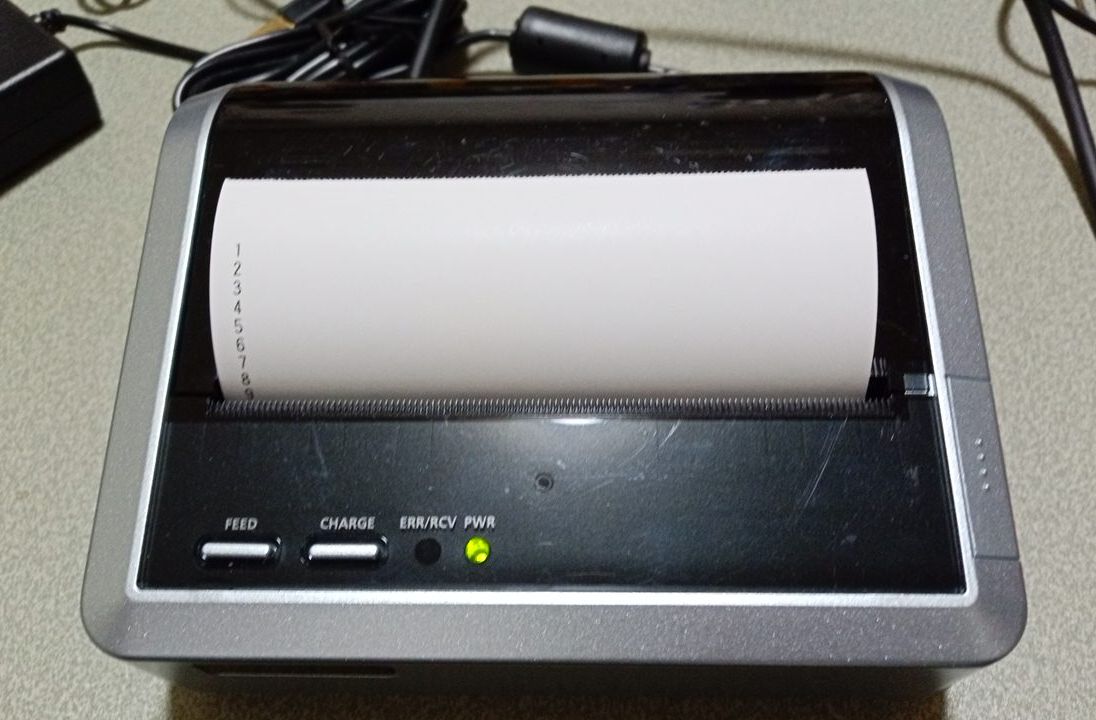
使用するUSBサーマルプリンタは三栄電機株式会社のBL-112UI-BH、ファームウェアバージョン3.04、USB1.1準拠です。
 PB-112PS/UI技術マニュアル
PB-112PS/UI技術マニュアル
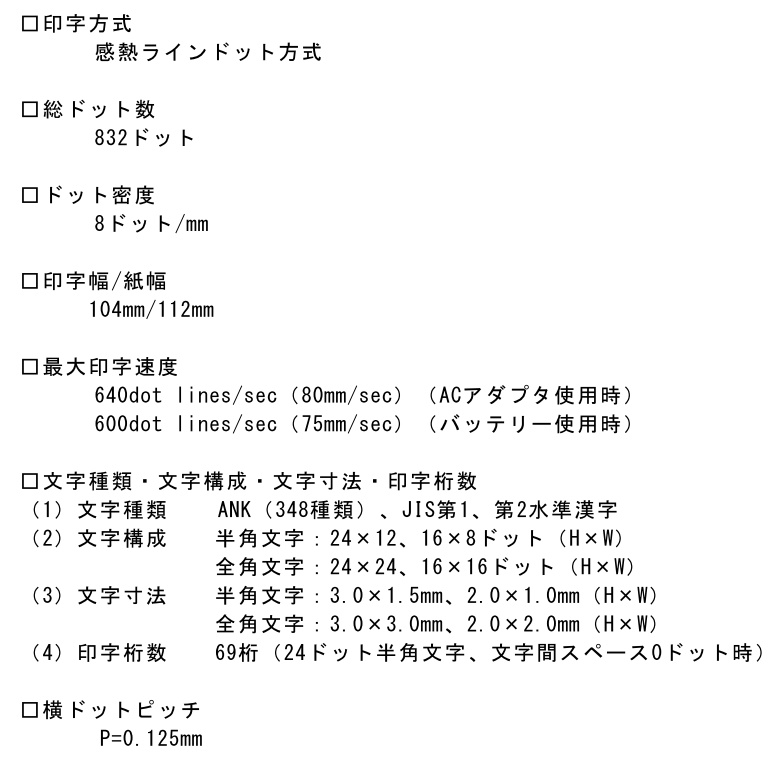
●BL-112UI プリンタ仕様
JIS第1・第2水準漢字は、日本工業規格(JIS X 0208)で定められたコンピュータ用漢字集合です。(6,879文字)
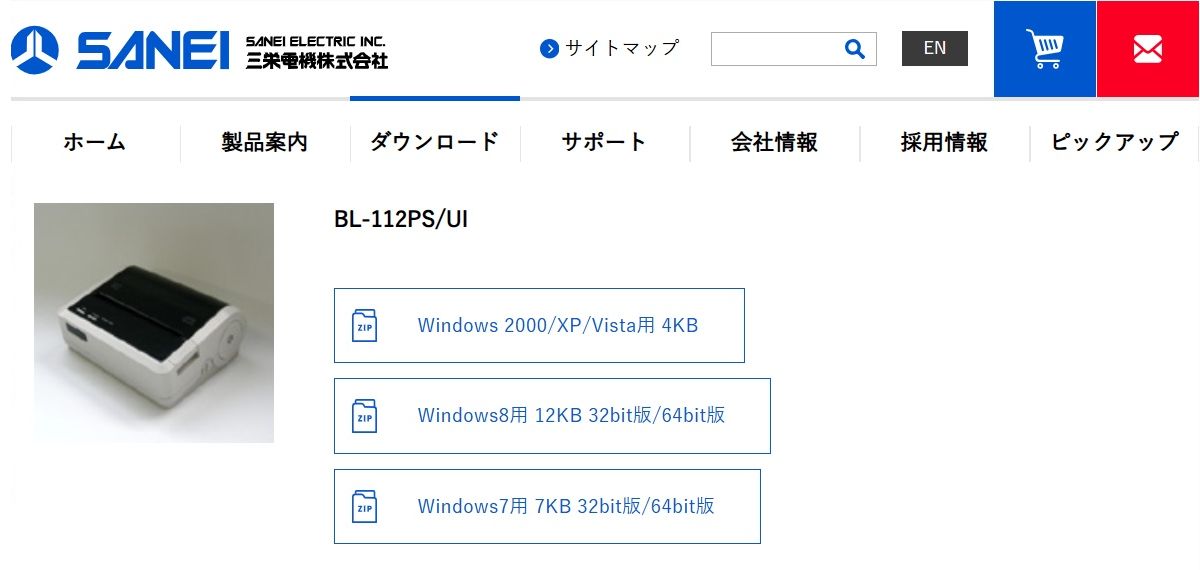
プリンタードライバー
ちなみに、Windows8 64bit版ドライバをWindows11にインストールしてみましたが、印刷に失敗してしまいました。
●ARDUINO NANO ESP32
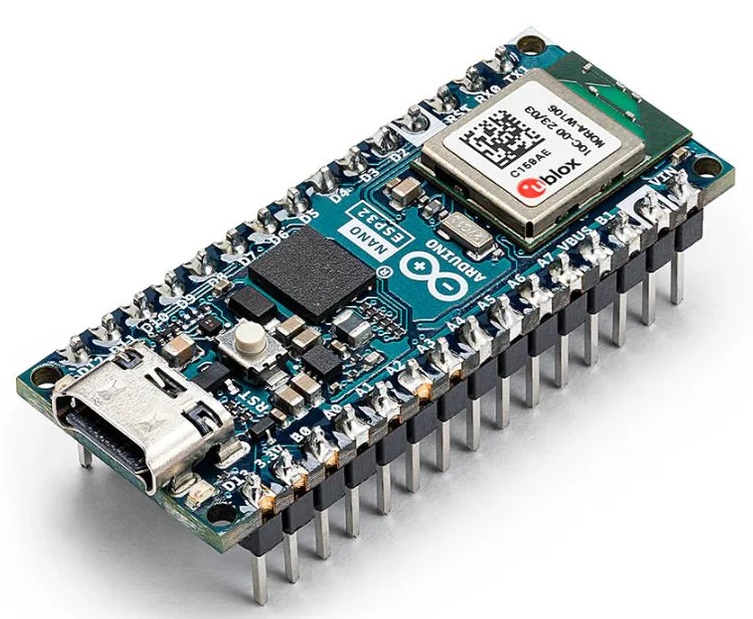
USB HOST機能を実装しているESP32-S3によりUSBサーマルプリンタを制御してみます。
ESP32-S3であれば何でもよいわけではありません。GPIO19.GPIO20ピンが引き出されるマイコンが必要です。
●USBホスト機能
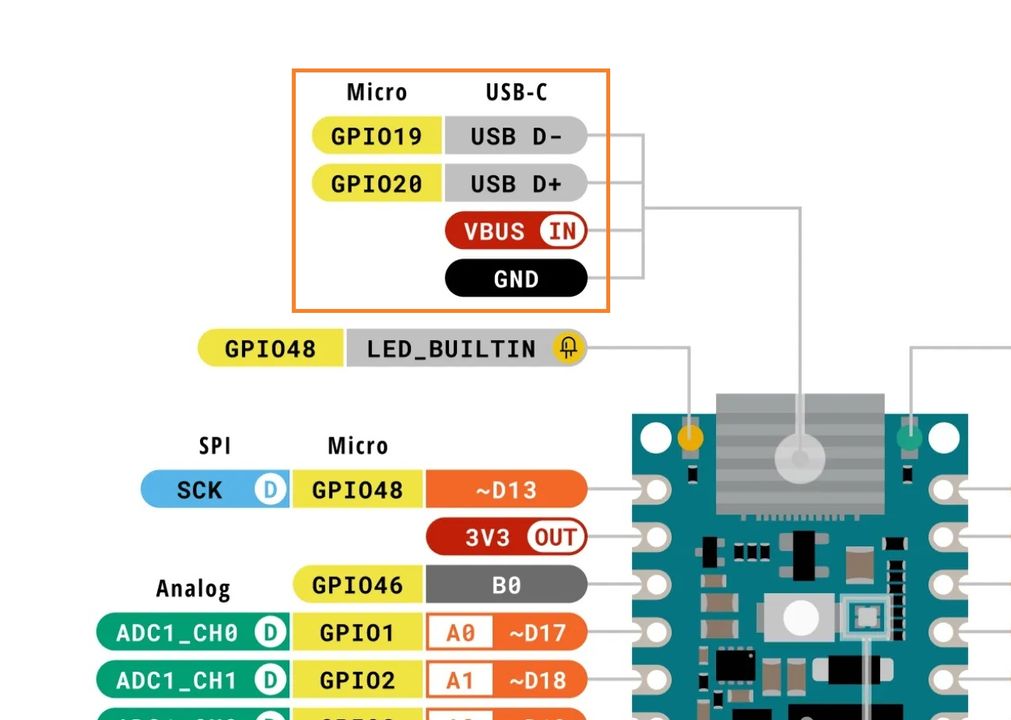
Nano ESP32 では、GPIO19(USB D-).GPIO20(USB D+)がUSB端子に引き出されており、USBホスト機能を利用することができます。
●USB PRINTライブラリ
touchgadget/esp32-usb-host-demos
こういったライブラリは、最新のUSBプリンタを認識できないことが多いのですが、
BL-112PS/UI取扱説明書の作成日付をみると2006年1月です。
この程度に古いプリンタ(USB1.1準拠)とは相性がよかったりします。
以下の3つのコードを使います。
- show_desc.hpp
- usbhhelp.hpp
- examples->usbhprinter->usbhprinter.ino
編集するコードは usbhprinter.ino です。
関数が呼び出される大まかな流れは下記の通りです。
static void printer_transfer_cb(usb_transfer_t *transfer)
{
ESP_LOGI("", "printer_transfer_cb context: %d", transfer->context);
~~~~~~~~~~~~~~~
}
void check_interface_desc_printer(const void *p)
{
~~~~~~~~~~~~~~~
ESP_LOGI("", "Claiming a %s-directional printer!",
(isBiDirectional)?"bi":"uni");
~~~~~~~~~~~~~~~
}
void prepare_endpoints(const void *p)
{
~~~~~~~~~~~~~~~
PrinterOut->callback = printer_transfer_cb;
~~~~~~~~~~~~~~~
}
void show_config_desc_full(const usb_config_desc_t *config_desc)
{
~~~~~~~~~~~~~~~
case USB_B_DESCRIPTOR_TYPE_INTERFACE:
show_interface_desc(p);
check_interface_desc_printer(p);
break;
case USB_B_DESCRIPTOR_TYPE_ENDPOINT:
show_endpoint_desc(p);
prepare_endpoints(p);
break;
~~~~~~~~~~~~~~~
}
void setup()
{
Serial.begin(115200);
Serial.setTimeout(0);
usbh_setup(show_config_desc_full);
}
void loop()
{
usbh_task();
String aLine = Serial.readStringUntil('\n');
if (aLine.length() > 0) {
aLine.concat('\n');
PrinterOut->num_bytes = aLine.length();
memcpy(PrinterOut->data_buffer,
aLine.c_str()
, PrinterOut->num_bytes);
esp_err_t err = usb_host_transfer_submit(PrinterOut);
if (err != ESP_OK) {
ESP_LOGI("", "usb_host_transfer_submit Out fail: %x", err);
}
}
}
まずはメッセージをSerial1に出力するように変更します
void setup()
{
Serial1.begin(115200,SERIAL_8N1, 6, 5);
Serial1.setTimeout(0);
usbh_setup(show_config_desc_full);
}
ESP32-S3では、Serialを任意のピンに割り振ることができるので、
ESP_LOGI()の出力先を明示的に指定します
ESP_LOGI("", ~)
↓
Serial1.printf(~)
ソースコードのビルドには、Raspberry Pi / PlatformIOを使用しています。
Arduino開発環境構築 PlatformIO
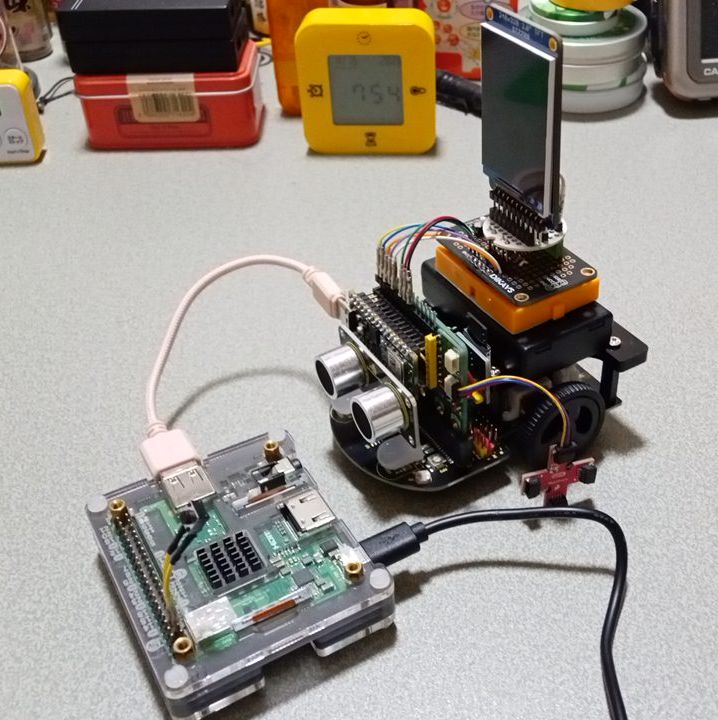
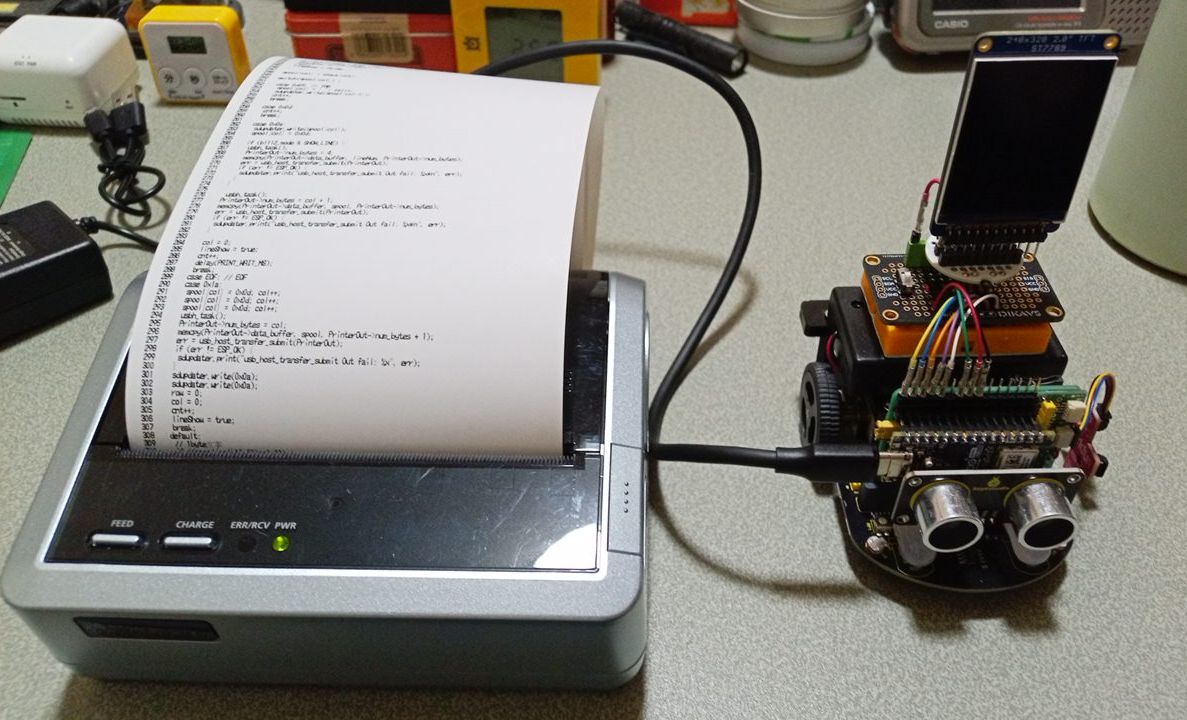
テストには月夜野4号車を使いました。
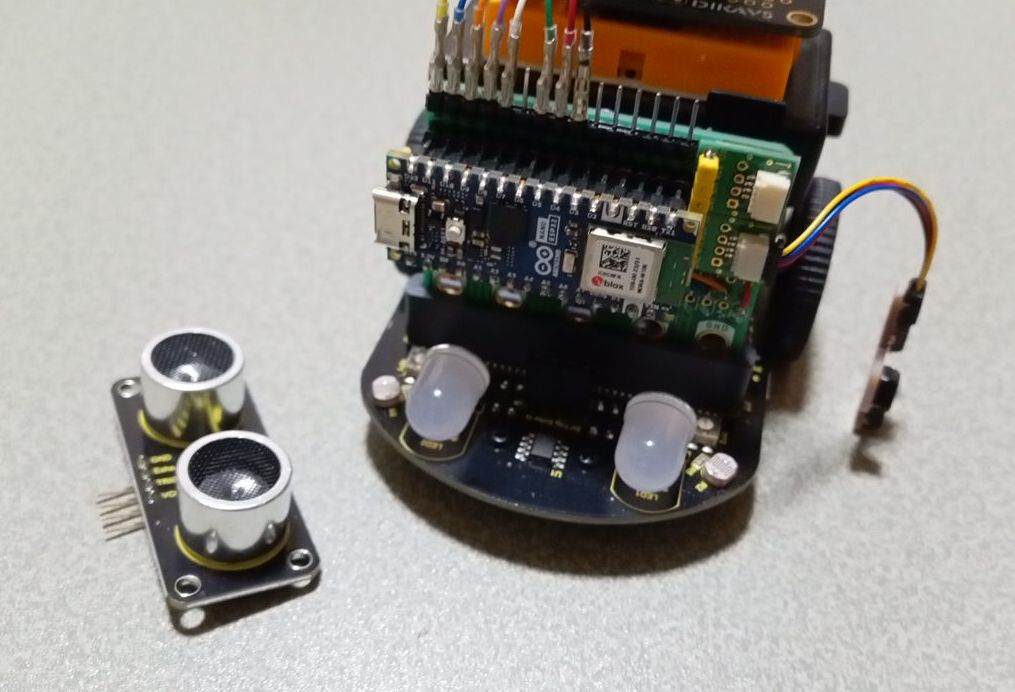
ロボットカー仕様になっていますがESP32-S3マイコンです。
ラズベリーパイとはビルド用にUSBケーブルを繋いでいます。
コードをビルドします
$ pio init -b arduino_nano_esp32
$ pio run -t upload
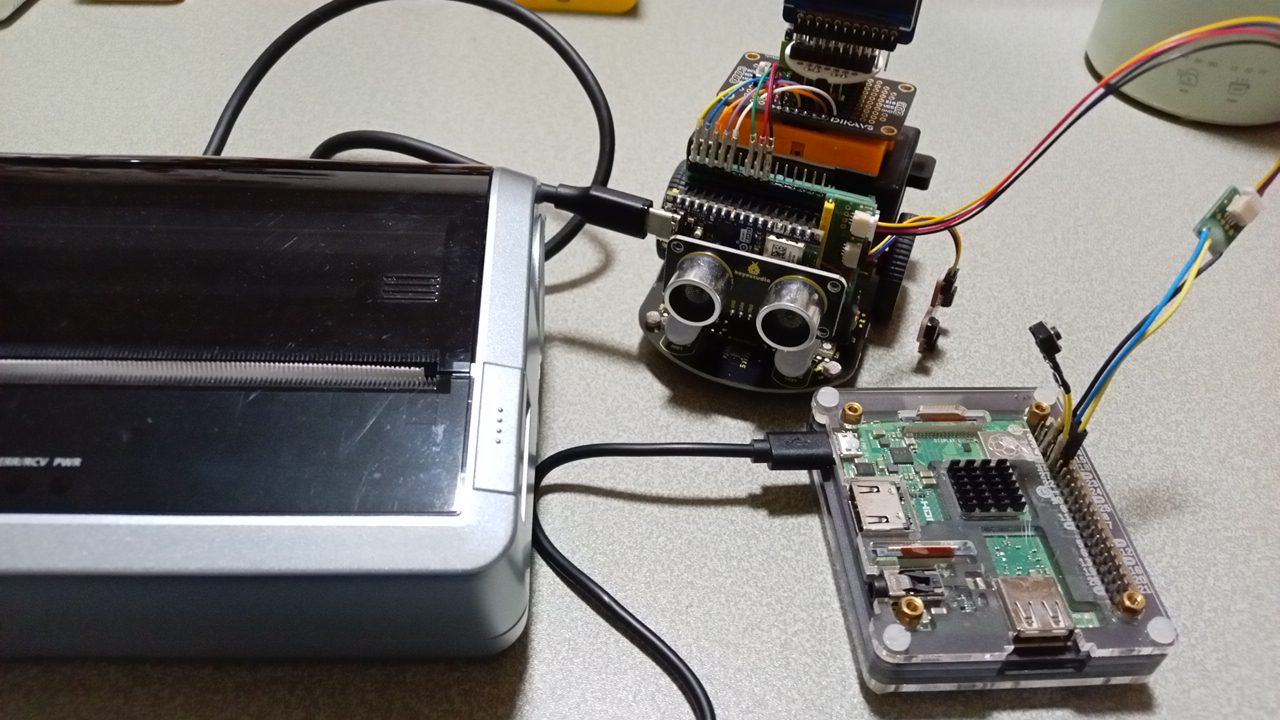
ビルド用に繋いでいたUSBケーブルを外して、プリンタと接続します。
実行時メッセージ表示用にラズベリーパイとシリアル接続します。
ESP32へは、ロボットカー搭載単4電池3個の電池ボックスから車体実装の3.3Vレギュレータを介して、VIN端子へ電力供給しています。
デバイスモニタを起動します。
$ pio device monitor -p /dev/ttyS0 -b 115200
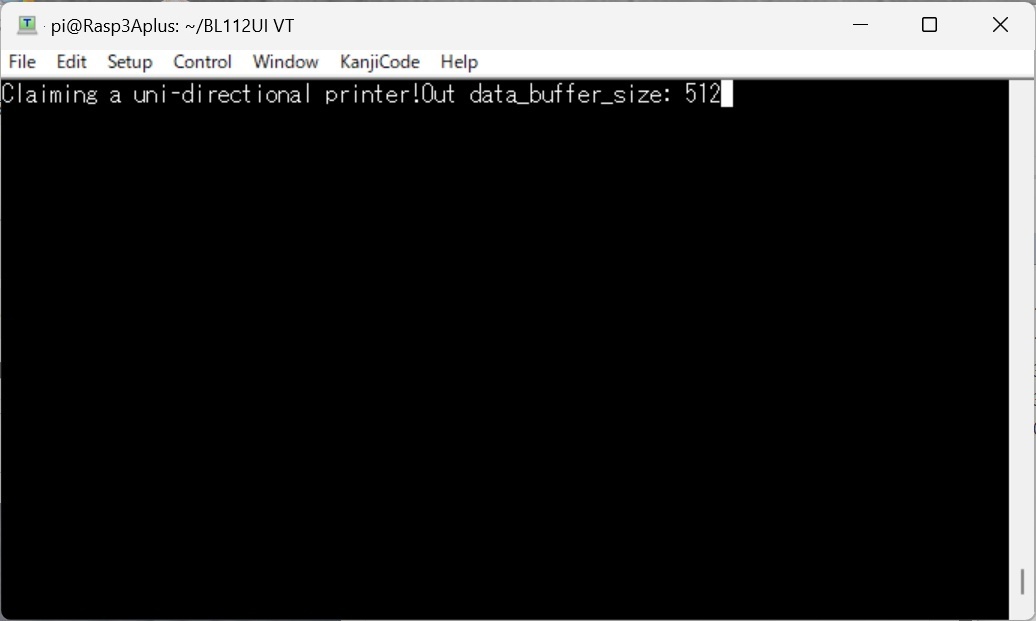
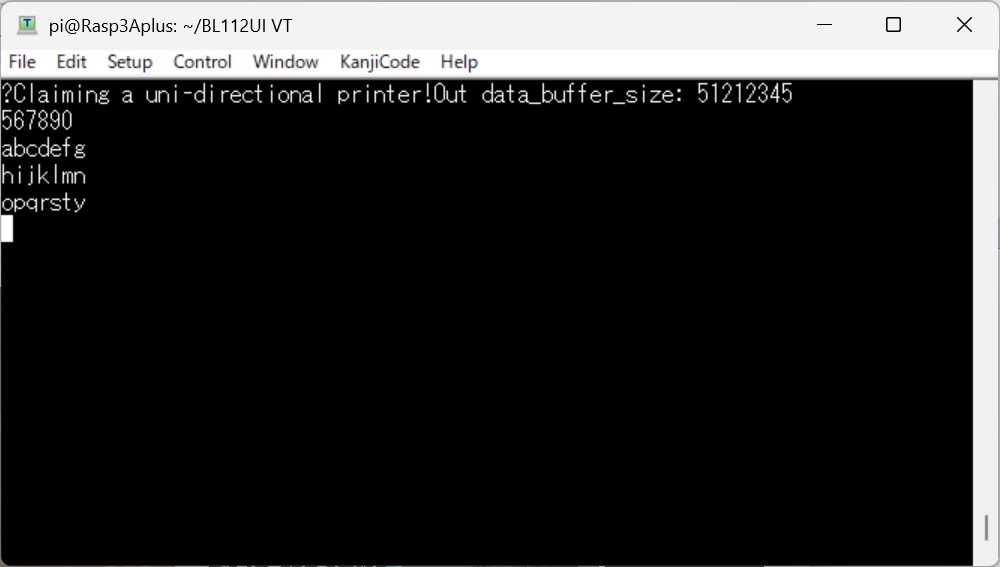
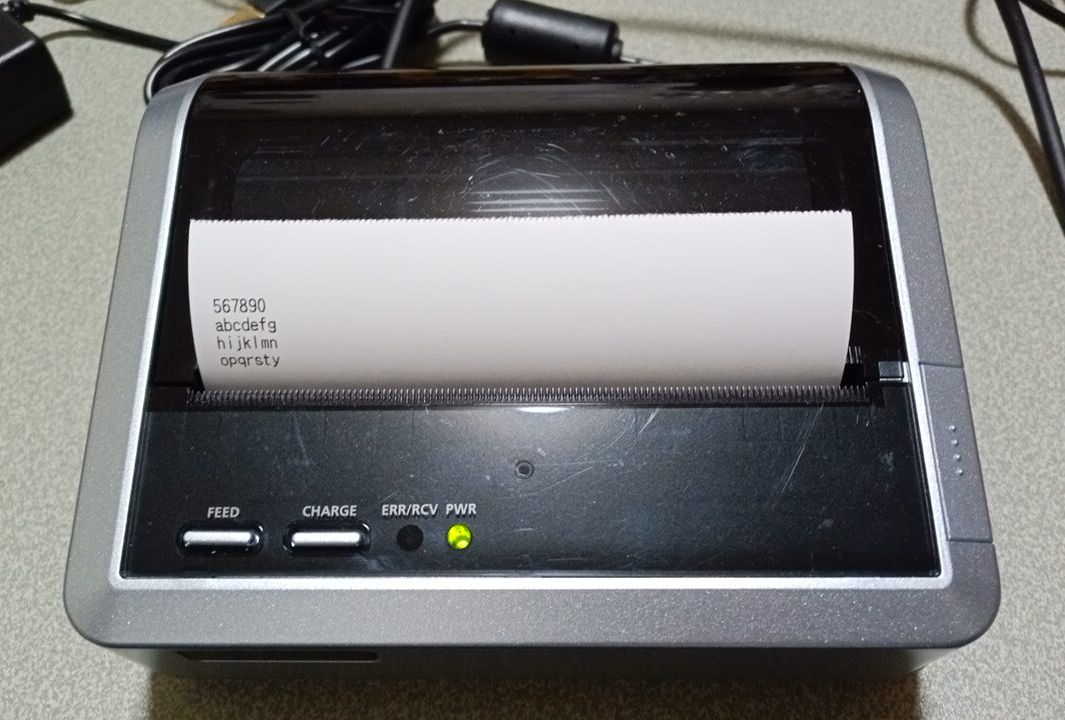
サーマルプリンタの電源スイッチをオンにして、プログラムを起動するとメッセージが表示されます。
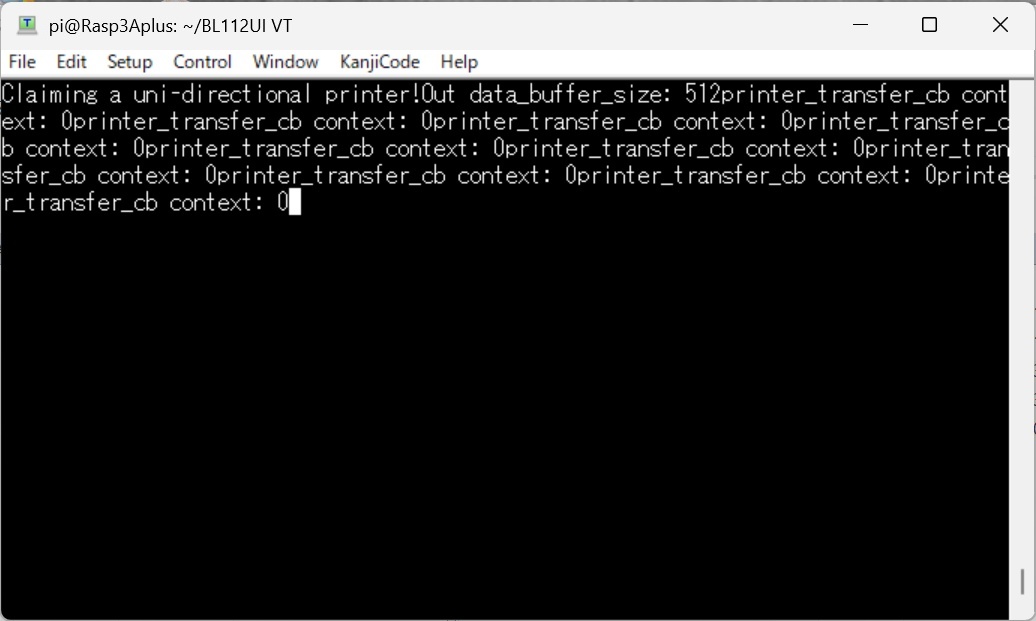
デバイスモニタ上からキーボード入力するたびに、コールバック関数が呼ばれ、関数内のメッセージ出力関数が実行されます。
Serial1.printf("printer_transfer_cb context: %d", transfer->context);
このメッセージは邪魔なので動作確認後はコメントアウトします。
1文字入力するたびにタイムアウトが発生するため即印字、改行されます。
印字は文字入力の際ではなく、改行コードが入力されると纏めて印字されます。
void setup()
{
Serial.begin(115200);
Serial.setTimeout(0);
usbh_setup(show_config_desc_full);
}
void loop()
{
usbh_task();
// ESP32 S2 Typewriter
// Read line from serial monitor and write to printer.
String aLine = Serial.readStringUntil('\n');
if (aLine.length() > 0) {
// readStringUntil removes the newline so add it back
aLine.concat('\n');
PrinterOut->num_bytes = aLine.length();
memcpy(PrinterOut->data_buffer,aLine.c_str(),PrinterOut->num_bytes);
esp_err_t err = usb_host_transfer_submit(PrinterOut);
●実用コードへの編集
1文字ごとに改行されては困るので、ソースコードを編集します。
char spool[SPOOL_BUFSIZE];
void setup()
{
Serial1.begin(115200,SERIAL_8N1, 6, 5);
//Serial1.setTimeout(0);
usbh_setup(show_config_desc_full);
}
void loop()
{
usbh_task();
if (Serial1.available()) {
spool[0] = Serial1.read();
Serial1.write(spool[0]);
PrinterOut->num_bytes = 1;
memcpy(PrinterOut->data_buffer, spool, PrinterOut->num_bytes);
esp_err_t err = usb_host_transfer_submit(PrinterOut);
if (err != ESP_OK) {
Serial1.printf("usb_host_transfer_submit Out fail: %x", err);
}
}
}
このコードでは入力文字のループバックも行っています。
Serial1.write(spool[0]);
●日本語処理
BL-112PS/UIの漢字コードはJIS X 0208です。
普段、テキストファイルはUTF-8で管理しているので、印刷時に漢字コードをJISに変換して印字しています。
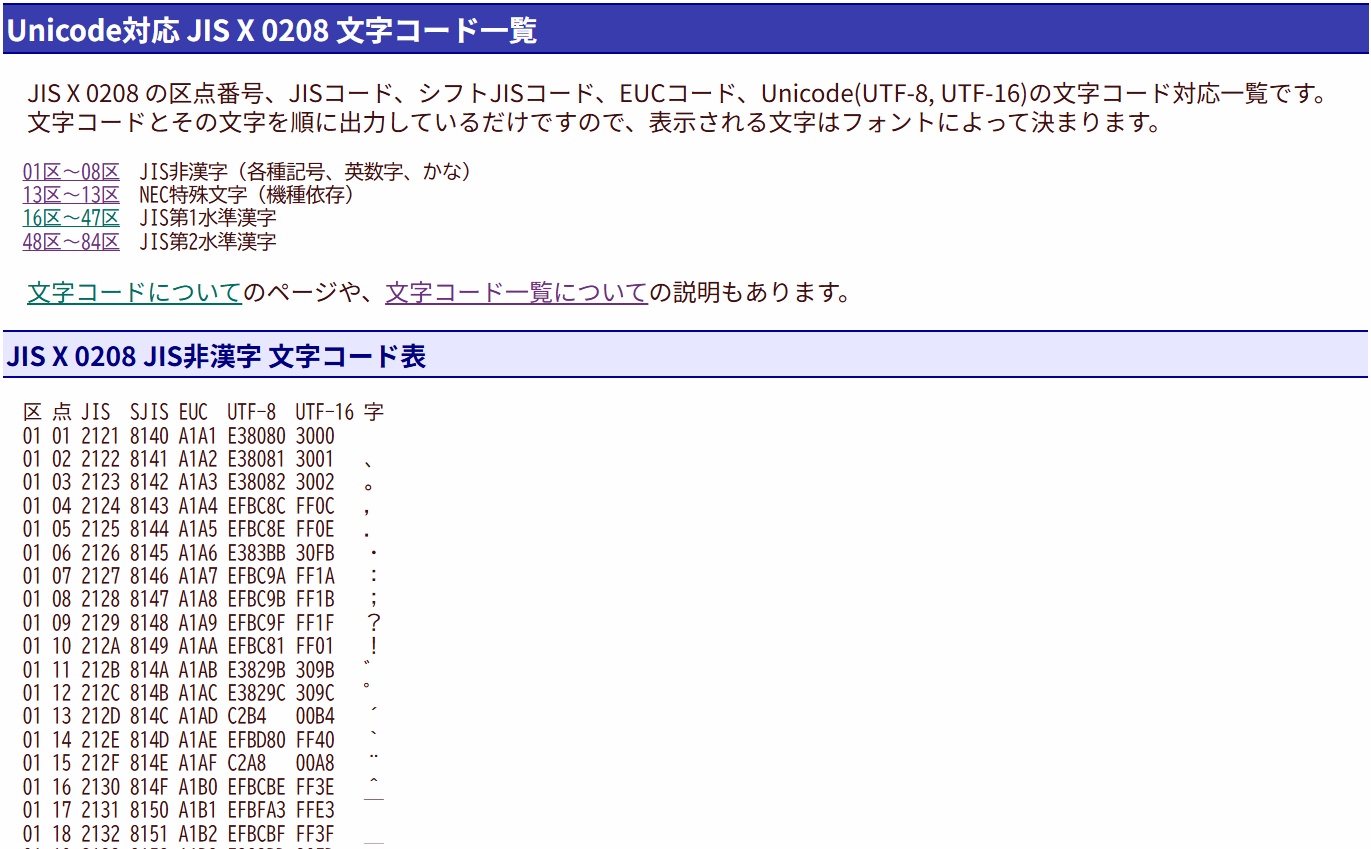
Unicode対応 JIS X 0208 文字コード一覧
漢字印刷には前準備が必要です。
1. UTF-8をJISに変換するライブラリが見つからなかったので、対応表を空白区切りでLibreOfficeに取り込み、UTF-8とJISの1対1対応部分のみを抽出します。
2. 編集後にタブ区切りでUTF-8テキストファイルとして書き出します。
3. これをPHPで読み込んで、バイナリ形式でmicroSDカードに保存します。
[UTF-8(3バイト)][JIS(2バイト)]~[UTF-8(3バイト)][JIS(2バイト)]
ファイルサイズは5バイト掛ける6879文字で34395バイトになります。
プログラムへの実装についてです。
1. ESP32-S3起動時にバイナリファイルをメモリー上に読み込みます。
2. UTF-8の漢字コードが入力された際に、UTF-8コードを検索し、対応するJISコードを取得します。
3. 漢字モード開始コードをプリンタに送信、次にJISコードを出力、最後に漢字モード終了コードを伝えます。
[0x1c][0x26][JISコード(2バイト)][0x1c][0x2e]
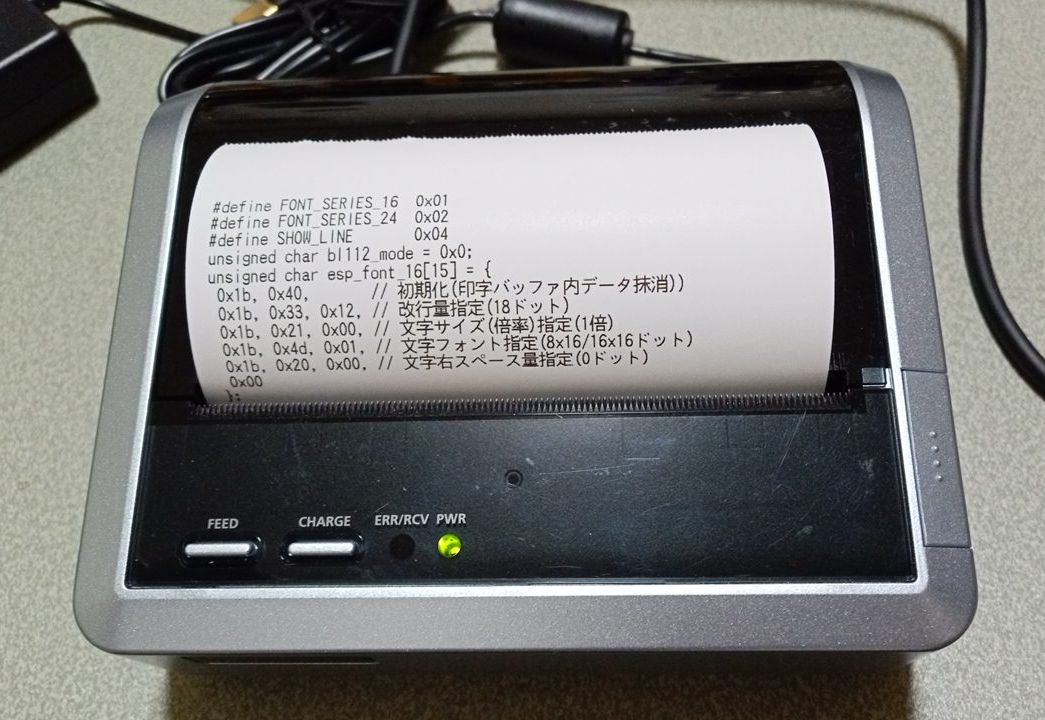
24x24ドットの漢字表示ではくっきりと印字されています。
●さらなる拡張
パソコン上のTeraTermを起動して、ESP32へTELNET接続、文字入力やファイル送信により印刷できるようにしました。
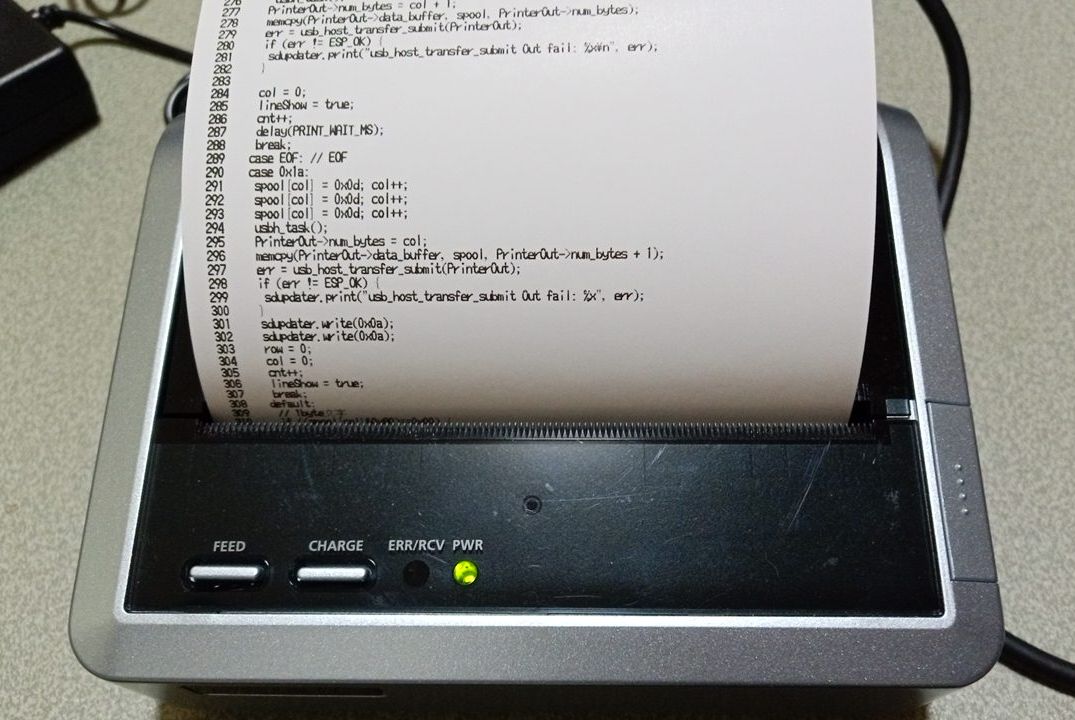
ソースコードの場合は行番号を付けて印字しています。
英数字8x16、漢字16x16ドット、行間2ドットを指定しています。
BL-112UIプリンタ仕様にACアダプタ使用時の最大印字速度は640dot lines/secとあり、
縦16ドットのフォントを使用した場合1秒で40行(25ms/行)、24ドットフォントで26.7行(37.5ms/行)印刷が可能です。
印字速度よりESP32の処理速度が圧倒的に早いので、印刷命令usb_host_transfer_submit()を発行した後に、
delay(25)あるいはdelay(38)の休止を挟まないと、印字が追い付かずプリンタがバグります。
●印刷物の持ち運び
以前取り上げた、AS-289R2などのロール紙の幅は58mmで、スティックのりPiTなどの空き容器に収納できますが、BL-112PS/UIのロール紙の幅は112mmです。
そこで、明治のマーブルチョコの円筒を使いました。
|












