#include <WiFi.h>
#include <Wire.h>
#include <SPI.h>
#include <SD.h>
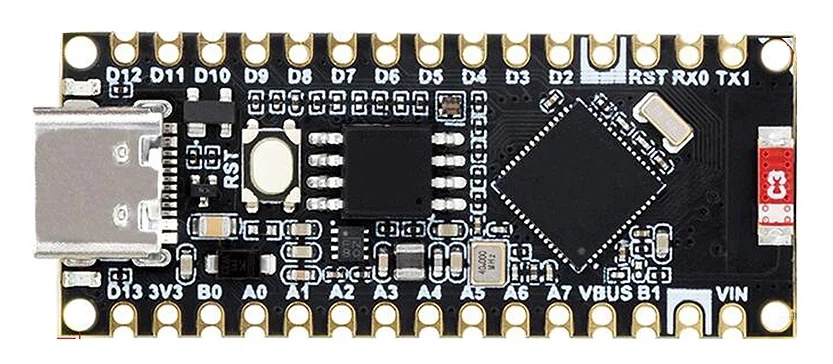
#define SPI_MISO 47 // D12
#define SPI_MOSI 38 // D11
#define SPI_SCK 48 // D13
#define SPI_DC 21 // D10
#define SPI_TFT_CS 18 // D9
#define SPI_TFT_RST 17 // D8
#define SPI_TFT_BL 10 // D7 Backlight
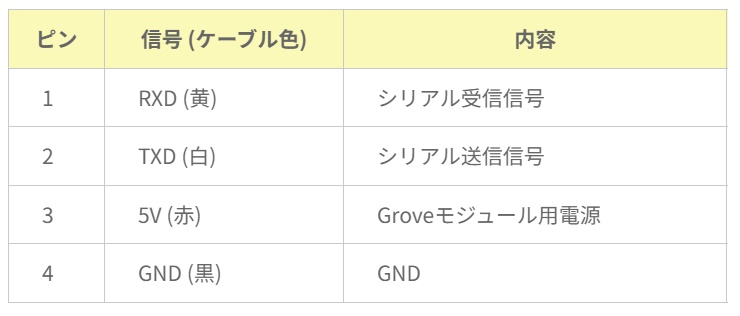
#define SERIAL2_RX 9 // Serial2 D6 ->QWIIC(RX)
#define SERIAL2_TX 8 // D5 ->QWIIC(TX)
#define SERIAL1_RX 6 // Serial1 D2
#define SERIAL1_TX 5 // D3
#define SERIAL0_RX 44 // Serial0 D0(RX0)
#define SERIAL0_TX 43 // D1(TX1)
SPIClass SPI2(HSPI);
#define SPI2_MISO 3 // microSD
#define SPI2_MOSI 2 //
#define SPI2_SCK 4 //
#define SPI2_CS 7 //
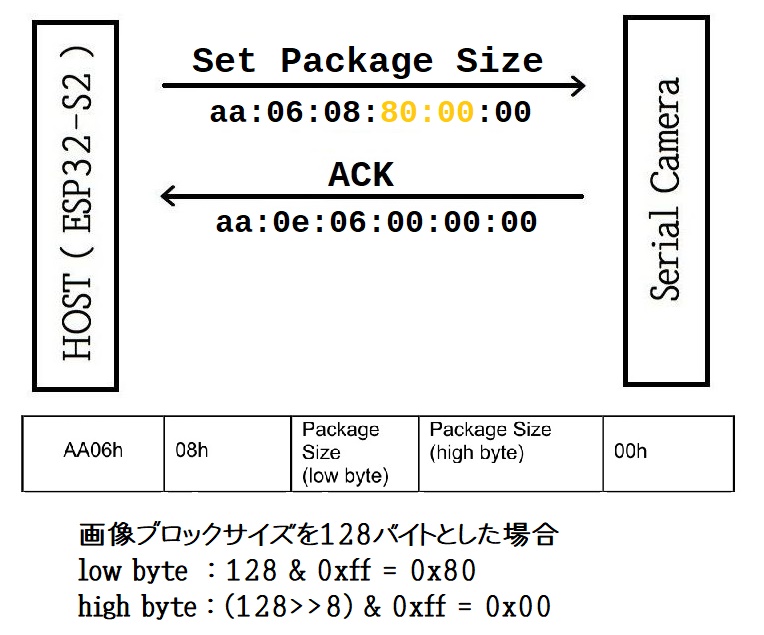
#define PIC_BLK_LEN 128 // data length of each read, dont set this too big because ram is limited
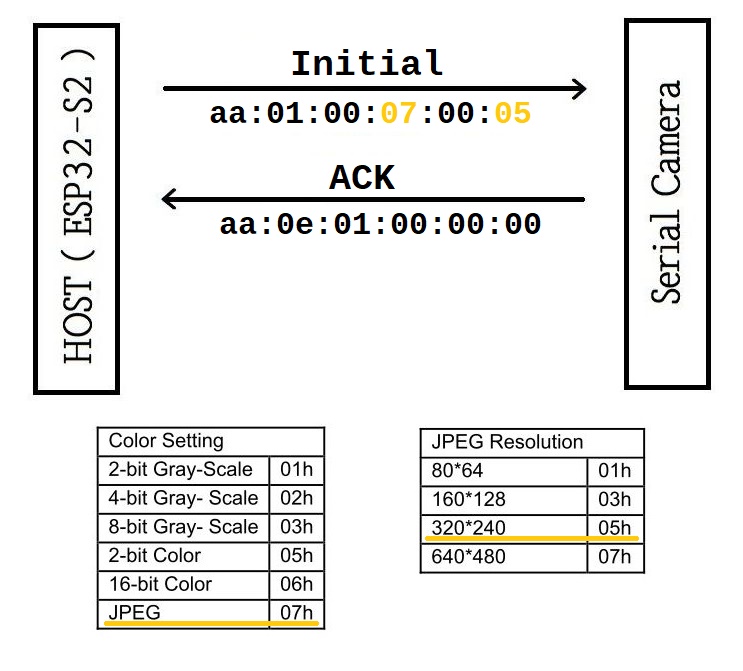
#define PIC_FMT_VGA 7 // 640x480
#define PIC_FMT_CIF 5 // 320x240
#define PIC_FMT_OCIF 3 // 160x128
#define CAM_SERIAL Serial
#define SHUTTER_PIN 1
#define SDSPEED 40000000
//#define PIC_FMT PIC_FMT_VGA
#define PIC_FMT PIC_FMT_CIF
unsigned long picTotalLen = 0; // picture length
#include <Adafruit_GFX.h>
#include <Adafruit_ST7789.h>
Adafruit_ST7789 tft = Adafruit_ST7789(SPI_TFT_CS, SPI_DC, SPI_MOSI, SPI_SCK, SPI_TFT_RST);
#define TFT_BLACK 0x0000
#define TFT_RED 0xF800
#define TFT_BLUE 0x001F
#define TFT_GREEN 0x07E0
#define TFT_WHITE 0xFFFF
#include "picojpeg.h"
char filenames[255];
uint8_t *jpeg = NULL;
typedef struct {
// Header
uint8_t Signature[2]; // 'BM'
uint8_t FileSize[4];
uint8_t reserved1[4]; // unused (=0)
uint8_t DataOffset[4];
// InfoHeader
uint8_t Size[4]; // Size of InfoHeader =40
uint8_t Width[4];
uint8_t Height[4];
uint8_t Planes[2]; // always 1
uint8_t BitPerPixel[2];
uint8_t Compression[4];
uint8_t ImageSize[4];
uint8_t XpixelsPerM[4];
uint8_t YpixelsPerM[4];
uint8_t ColorsUsed[4];
uint8_t ImportantColors[4];
} BMP_FORMAT;
BMP_FORMAT Bmp;
typedef struct {
uint8_t R;
uint8_t G;
uint8_t B;
} PIXEL_INFO;
PIXEL_INFO *RGBs = NULL;
uint16_t *color565s = NULL;
typedef struct {
uint32_t Width;
uint32_t Height;
uint16_t BitPerPixel;
uint32_t FileSize;
uint32_t DataOffset;
uint32_t ImageSize;
uint32_t ColorsUsed;
} IMAGE_INFO;
IMAGE_INFO img;
#define local_min(a,b) (((a) < (b)) ? (a) : (b))
FILE *stream;
pjpeg_image_info_t image_info;
int jpeg_is_available;
int jpeg_mcu_x;
int jpeg_mcu_y;
uint jpeg_read_offset;
uint jpeg_size;
// for JPEGDec - public
uint8_t *jpeg_pImage;
int jpeg_MCUSPerRow;
int jpeg_MCUSPerCol;
int jpeg_MCUWidth;
int jpeg_MCUHeight;
int jpeg_MCUx;
int jpeg_MCUy;
void clearRxBuf()
{
while (Serial2.available()) Serial2.read();
}
void sendCmd(char cmd[], int cmd_len)
{
for (char i = 0; i < cmd_len; i++) Serial2.write(cmd[i]);
}
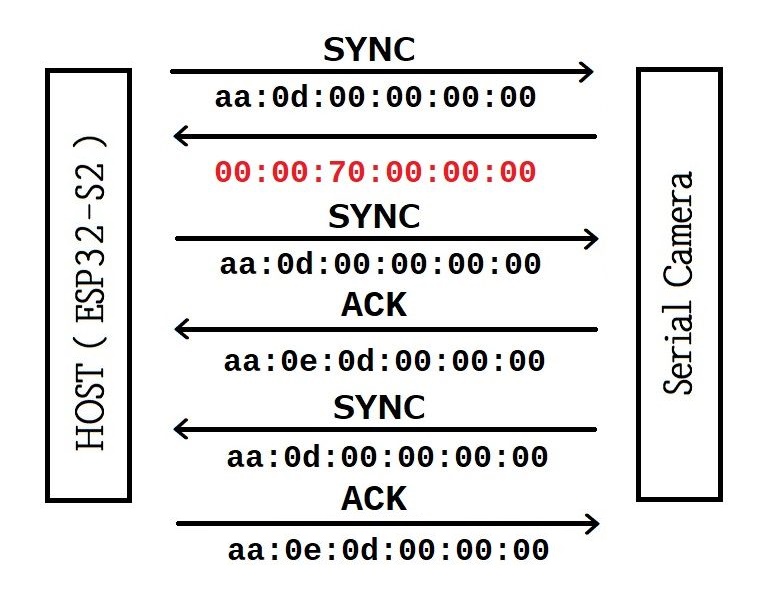
void initialize()
{
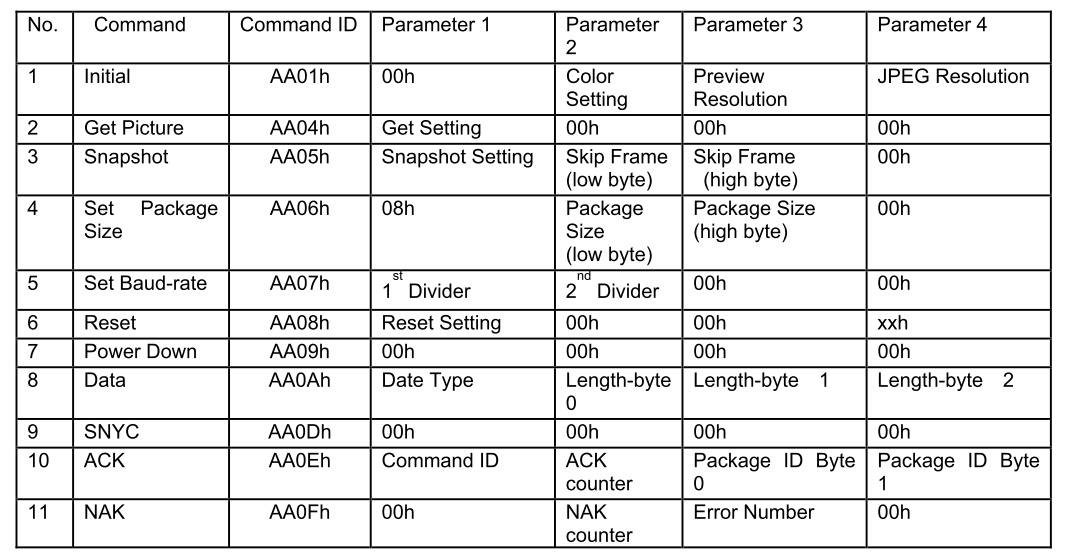
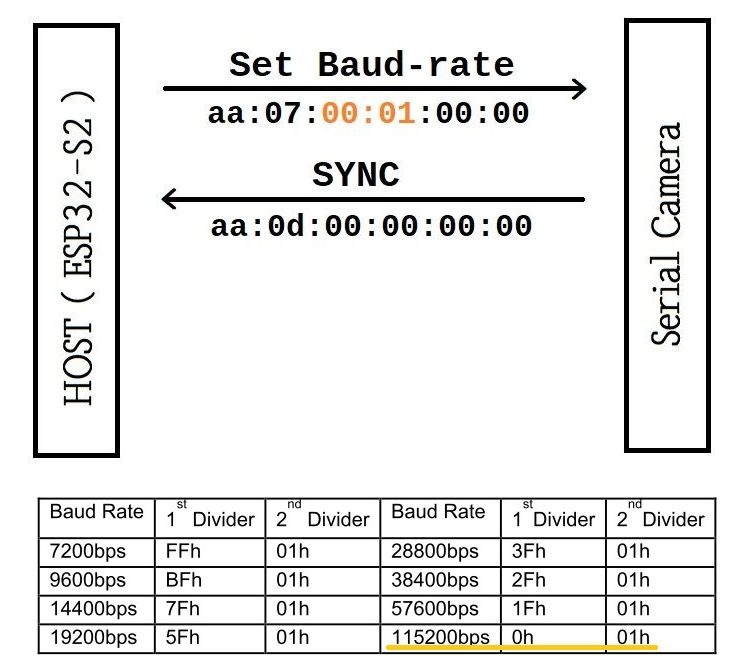
char cmd[] = {0xaa,0x0d,0x00,0x00,0x00,0x00} ; // SNYC
char cmd_reset[] = {0xaa,0x08,0x00,0x00,0x00,0x00} ; // Reset & Reboot
unsigned char resp[6];
uint8_t len;
Serial2.setTimeout(500);
while (1) {
//clearRxBuf();
sendCmd(cmd,6); // SNYC
// Receive ACK from OV528
len = Serial2.readBytes((char *)resp, 6);
// aa:0e:0d:00:00:00
if (len == 6) {
if ( resp[0] == 0xaa
&& resp[1] == 0x0e
&& resp[2] == 0x0d
&& resp[4] == 0
&& resp[5] == 0) {
// Receive SNYC from OV528
len = Serial2.readBytes((char *)resp, 6);
// aa:0d:00:00:00:00
if (len == 6) {
if ( resp[0] == 0xaa
&& resp[1] == 0x0d
&& resp[2] == 0
&& resp[3] == 0
&& resp[4] == 0
&& resp[5] == 0)
break;
}
} else {
// fd:3f:08:00:00:00
sendCmd(cmd_reset,6); // Reset & Reboot
}
}
}
cmd[1] = 0x0e; // ACK
cmd[2] = 0x0d;
sendCmd(cmd, 6);
// Baud Rate 115200bps
cmd[1] = 0x07;
cmd[2] = 0x00;
cmd[3] = 0x01;
cmd[4] = 0x00;
cmd[5] = 0x00;
sendCmd(cmd, 6);
len = Serial2.readBytes((char *)resp, 6);
}
void preCapture()
{
uint8_t len;
char cmd[] = { 0xaa, 0x01, 0x00, 0x07, 0x00, PIC_FMT };
unsigned char resp[6];
Serial2.setTimeout(100);
while (1) {
clearRxBuf();
sendCmd(cmd, 6);
len = Serial2.readBytes((char *)resp, 6);
if (len == 6) {
if ( resp[0] == 0xaa
&& resp[1] == 0x0e
&& resp[2] == 0x01
&& resp[4] == 0
&& resp[5] == 0)
break;
}
initialize();
}
}
unsigned long Capture()
{
char cmd[] = { 0xaa, 0x06, 0x08, PIC_BLK_LEN & 0xff, (PIC_BLK_LEN>>8) & 0xff ,0};
unsigned char resp[6];
uint8_t len;
picTotalLen = 0;
Serial2.setTimeout(100);
while (1) {
clearRxBuf();
sendCmd(cmd, 6);
len = Serial2.readBytes((char *)resp, 6);
if (len == 6) {
if ( resp[0] == 0xaa
&& resp[1] == 0x0e
&& resp[2] == 0x06
&& resp[4] == 0
&& resp[5] == 0)
{
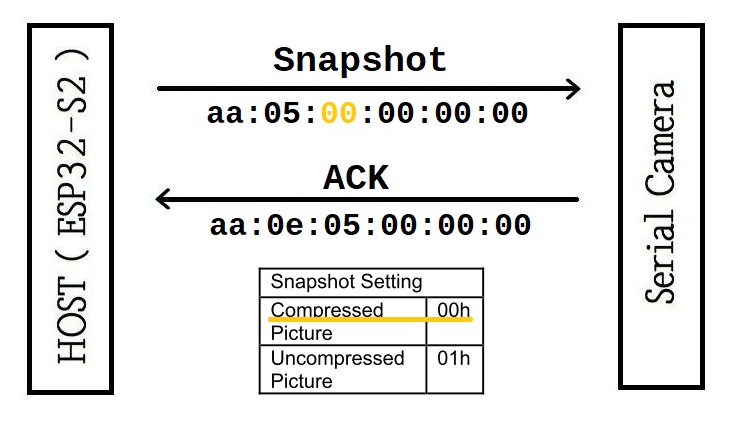
cmd[1] = 0x05;
cmd[2] = 0;
cmd[3] = 0;
cmd[4] = 0;
cmd[5] = 0;
while (1) {
clearRxBuf();
sendCmd(cmd, 6);
len = Serial2.readBytes((char *)resp, 6);
if (len == 6) {
if ( resp[0] == 0xaa
&& resp[1] == 0x0e
&& resp[2] == 0x05
&& resp[4] == 0
&& resp[5] == 0)
break;
}
}
}
cmd[1] = 0x04;
cmd[2] = 0x1;
while (1) {
clearRxBuf();
sendCmd(cmd, 6);
len = Serial2.readBytes((char *)resp, 6);
if (len == 6) {
if ( resp[0] == 0xaa
&& resp[1] == 0x0e
&& resp[2] == 0x04
&& resp[4] == 0
&& resp[5] == 0) {
Serial2.setTimeout(1000);
len = Serial2.readBytes((char *)resp, 6);
if (len == 6) {
if ( resp[0] == 0xaa
&& resp[1] == 0x0a
&& resp[2] == 0x01) {
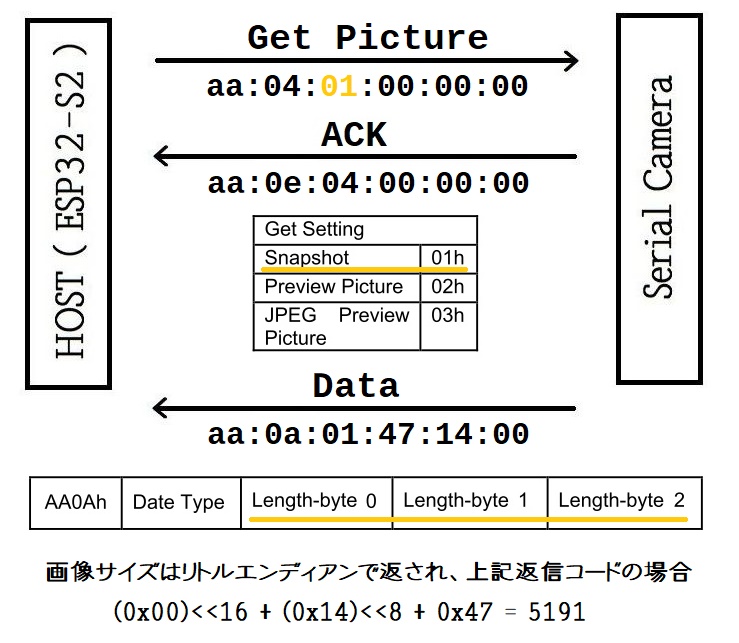
picTotalLen = (resp[3]) | (resp[4] << 8) | (resp[5] << 16);
return picTotalLen;
}
}
}
}
}
}
initialize();
preCapture();
}
return picTotalLen;
}
boolean GetData()
{
uint8_t *imgPt = jpeg;
uint16_t cnt = 0;
int retry_cnt = 0;
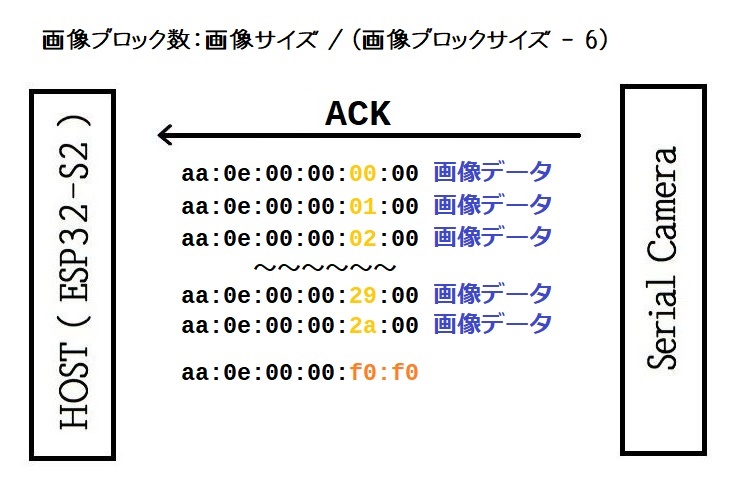
unsigned int pktCnt = (picTotalLen) / (PIC_BLK_LEN - 6);
if ((picTotalLen % (PIC_BLK_LEN-6)) != 0) pktCnt += 1;
char cmd[] = { 0xaa, 0x0e, 0x00, 0x00, 0x00, 0x00 };
unsigned char pkt[PIC_BLK_LEN];
Serial2.setTimeout(1000);
for (unsigned int i = 0; i < pktCnt; i++) {
cmd[4] = i & 0xff;
cmd[5] = (i >> 8) & 0xff;
int retry_cnt = 0;
retry:
delay(10);
clearRxBuf();
sendCmd(cmd, 6);
retry_cnt = 0;
while (1) {
cnt = Serial2.readBytes((char *)pkt, PIC_BLK_LEN);
if (cnt > 0) break;
if (++retry_cnt > 10) return false;
}
retry_cnt = 0;
unsigned char sum = 0;
for (int y = 0; y < cnt - 2; y++) sum += pkt[y];
if (sum != pkt[cnt-2]) {
if (++retry_cnt < 100) goto retry; else return false;
}
memcpy(imgPt, &pkt[4], cnt-6);
imgPt += (cnt-6);
}
cmd[4] = 0xf0;
cmd[5] = 0xf0;
sendCmd(cmd, 6);
return true;
}
boolean saveBMP(uint32_t width, uint32_t height)
{
File bmpFile;
PIXEL_INFO *rgb = RGBs;
int x,y;
int from_x, from_y, to_y;
uint32_t pos;
static int picNameNum = 1;
char picName[] = "/ov528/pic00.bmp";
while (picNameNum <= 100) {
picName[10] = picNameNum/10 + '0';
picName[11] = picNameNum%10 + '0';
if (!SD.exists(picName)) break;
picNameNum++;
}
if (picNameNum > 100) return false;
img.BitPerPixel = 24;
img.ColorsUsed = 0;
if (width > 0) img.Height = height;
if (height > 0) img.Width = width;
img.ImageSize = img.Width * img.Height * 3;
img.DataOffset = sizeof(BMP_FORMAT);
img.FileSize = img.DataOffset + img.ImageSize;
memset(&Bmp, 0x00, sizeof(BMP_FORMAT));
memcpy(&Bmp.Signature,(uint8_t*)"BM",2);
long2byte(Bmp.FileSize, img.FileSize);
long2byte(Bmp.DataOffset, img.DataOffset);
long2byte(Bmp.Size, 40);
long2byte(Bmp.Width, img.Width);
long2byte(Bmp.Height, img.Height);
short2byte(Bmp.Planes, 1);
short2byte(Bmp.BitPerPixel, img.BitPerPixel);
long2byte(Bmp.ImageSize, img.ImageSize);
long2byte(Bmp.ColorsUsed, img.ColorsUsed);
bmpFile = SD.open(picName, FILE_WRITE);
if(!bmpFile) {
SD.end();
return false;
}
bmpFile.write((uint8_t*)&Bmp, sizeof(BMP_FORMAT));
bmpFile.write((const uint8_t *)rgb, img.ImageSize);
bmpFile.close();
SD.end();
return true;
}
static uint8_t pjpeg_need_bytes_callback(uint8_t* pBuf, uint8_t buf_size, uint8_t *pBytes_actually_read, void *pCallback_data) {
pjpeg_callback(pBuf, buf_size, pBytes_actually_read, pCallback_data);
return 0;
}
uint8_t pjpeg_callback(uint8_t* pBuf, uint8_t buf_size, uint8_t *pBytes_actually_read, void *pCallback_data) {
uint n;
n = local_min(jpeg_size - jpeg_read_offset, buf_size);
fread(pBuf,n,1,stream);
*pBytes_actually_read = (uint8_t)(n);
jpeg_read_offset += n;
return 0;
}
int JpegDec_decode(unsigned long len)
{
jpeg_mcu_x = 0;
jpeg_mcu_y = 0;
jpeg_is_available = 0;
jpeg_read_offset = 0;
jpeg_size = len;
uint8_t status = pjpeg_decode_init(&image_info, pjpeg_need_bytes_callback, NULL, 0);
if (status) return -1;
// In reduce mode output 1 pixel per 8x8 block.
jpeg_MCUSPerRow = image_info.m_MCUSPerRow;
jpeg_MCUSPerCol = image_info.m_MCUSPerCol;
jpeg_MCUWidth = image_info.m_MCUWidth;
jpeg_MCUHeight = image_info.m_MCUHeight;
jpeg_pImage = new uint8_t[image_info.m_MCUWidth * image_info.m_MCUHeight * 3];
// jpeg_pImage = (uint8_t *)malloc(jpeg_MCUWidth * jpeg_MCUHeight * 3);
if (!jpeg_pImage) return -1;
memset(jpeg_pImage, 0, sizeof(jpeg_pImage));
jpeg_is_available = 1 ;
return JpegDec_decode_mcu();
}
int JpegDec_decode_mcu(void) {
uint8_t status = pjpeg_decode_mcu();
if (status) {
jpeg_is_available = 0 ;
if (status != PJPG_NO_MORE_BLOCKS) return -1;
}
return 1;
}
int JpegDec_read(void)
{
int y, x;
uint8_t *pDst_row;
if(jpeg_is_available == 0 || jpeg_mcu_y >= image_info.m_MCUSPerCol) return 0;
// Copy MCU's pixel blocks into the destination RGBs.
pDst_row = jpeg_pImage;
for (y = 0; y < image_info.m_MCUHeight; y += 8) {
const int by_limit = local_min(8, image_info.m_height - (jpeg_mcu_y * image_info.m_MCUHeight + y));
for (x = 0; x < image_info.m_MCUWidth; x += 8) {
uint8_t *pDst_block = pDst_row + x * 3;
// Compute source byte offset of the block in the decoder's MCU buffer.
uint src_ofs = (x * 8U) + (y * 16U);
const uint8_t *pSrcR = image_info.m_pMCUBufR + src_ofs;
const uint8_t *pSrcG = image_info.m_pMCUBufG + src_ofs;
const uint8_t *pSrcB = image_info.m_pMCUBufB + src_ofs;
const int bx_limit = local_min(8, image_info.m_width - (jpeg_mcu_x * image_info.m_MCUWidth + x));
int bx, by;
for (by = 0; by < by_limit; by++) {
uint8_t *pDst = pDst_block;
for (bx = 0; bx < bx_limit; bx++) {
pDst[0] = *pSrcR++;
pDst[1] = *pSrcG++;
pDst[2] = *pSrcB++;
pDst += 3;
}
pSrcR += (8 - bx_limit);
pSrcG += (8 - bx_limit);
pSrcB += (8 - bx_limit);
pDst_block += jpeg_MCUWidth * 3;
}
}
pDst_row += (jpeg_MCUWidth * 8 *3 );
}
jpeg_MCUx = jpeg_mcu_x;
jpeg_MCUy = jpeg_mcu_y;
jpeg_mcu_x++;
if (jpeg_mcu_x == image_info.m_MCUSPerRow) {
jpeg_mcu_x = 0;
jpeg_mcu_y++;
}
if(JpegDec_decode_mcu() < 0) jpeg_is_available = 0 ;
return 1;
}
void short2byte(uint8_t *pt, uint16_t val) {
*pt = (uint8_t)val &0x00ff;
*(pt+1) = (uint8_t)((val>>8)&0x00ff);
}
void long2byte(uint8_t *pt, uint32_t val) {
*pt = (uint8_t)val &0x000000ff;
*(pt+1) = (uint8_t)((val>> 8)&0x000000ff);
*(pt+2) = (uint8_t)((val>>16)&0x000000ff);
*(pt+3) = (uint8_t)((val>>24)&0x000000ff);
}
boolean Jpeg2RGBs(uint8_t *data, uint32_t len, uint32_t *width, uint32_t *height)
{
uint8_t *pImg;
uint32_t pos;
int x,y,bx,by;
if((stream = fmemopen((void*)data, len, "rb"))==NULL) return false;
// Decoding start
if ( JpegDec_decode(len) == -1) return false;
*width = image_info.m_width;
*height = image_info.m_height;
while(JpegDec_read()){
pImg = jpeg_pImage;
for(by=0; by<jpeg_MCUHeight; by++){
for(bx=0; bx<jpeg_MCUWidth; bx++){
x = jpeg_MCUx * jpeg_MCUWidth + bx;
y = jpeg_MCUy * jpeg_MCUHeight + by;
if(x<image_info.m_width && y<image_info.m_height){
pos = x + (y * image_info.m_width);
RGBs[pos].B = pImg[0];
RGBs[pos].G = pImg[1];
RGBs[pos].R = pImg[2];
color565s[pos] = ((RGBs[pos].B >> 3)<<11) | ((RGBs[pos].G >> 2)<<5) | (RGBs[pos].R >> 3);
}
pImg += 3;
}
}
}
delete[] jpeg_pImage;
return true;
}
void setup()
{
char filename[64], *pt;
uint32_t pos, x, y;
uint32_t bmp_width, bmp_height;
pinMode(SPI2_CS, OUTPUT);
SPI2.begin(SPI2_SCK, SPI2_MISO, SPI2_MOSI, -1);
while(!SD.begin(SPI2_CS, SPI2, SDSPEED)) delay(100);
pinMode(SHUTTER_PIN, INPUT); // initialize the pushbutton pin as an input
Serial2.begin(115200, SERIAL_8N1, SERIAL2_RX, SERIAL2_TX);
initialize();
preCapture();
if (!(color565s = (uint16_t*)malloc(320*240*2))) while(1);
if (!(RGBs = (PIXEL_INFO *)malloc(320 * 240 * sizeof(PIXEL_INFO)))) while(1);
tft.init(240, 320); // Init ST7789
tft.setRotation(1);
while(1) {
if (Capture() > 0) {
if (jpeg) free(jpeg);
if ((jpeg = (uint8_t*)malloc(picTotalLen))) {
if (GetData()) {
Jpeg2RGBs(jpeg, picTotalLen, &bmp_width, &bmp_height);
tft.drawRGBBitmap(0, 0, color565s, bmp_width, bmp_height);
if (digitalRead(SHUTTER_PIN)) {
tft.setCursor(10, 10);
tft.setTextColor(TFT_RED, TFT_BLACK);
tft.setTextSize(1);
tft.println("[REC]");
saveBMP(bmp_width, bmp_height);
}
}
}
}
}
}
void loop() {}

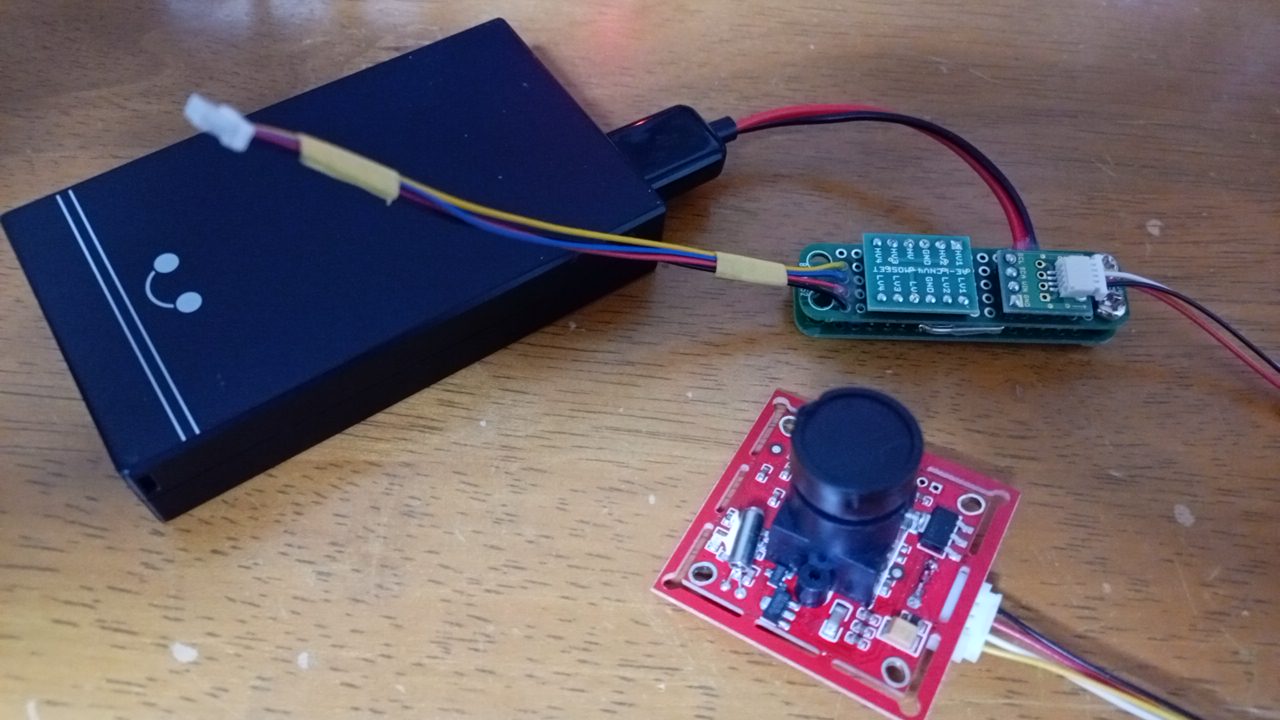
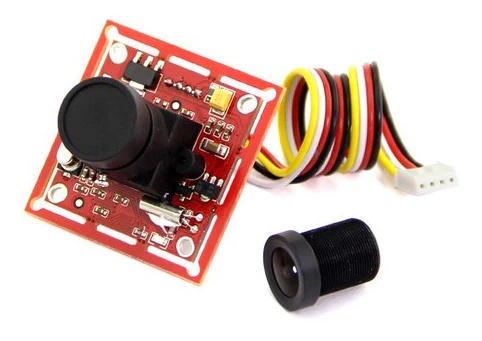 入力電圧:5V/
画素数:30万画素/
解像度:640x480, 320x240, 160x120/
UART:9600~115200[bps]/
通信方式:RS485, RS232/
寸法:76.5x153x12[mm]/
JPEG圧縮:高/中/低品質の三種類/
AGC機能搭載/
自動ホワイトバランス/
自動露出制御/
フォーカス制御可能
入力電圧:5V/
画素数:30万画素/
解像度:640x480, 320x240, 160x120/
UART:9600~115200[bps]/
通信方式:RS485, RS232/
寸法:76.5x153x12[mm]/
JPEG圧縮:高/中/低品質の三種類/
AGC機能搭載/
自動ホワイトバランス/
自動露出制御/
フォーカス制御可能
 左のワニ口テストクリップのワニ口クリップ部分はカットして、電源ケーブルとして用います。
左のワニ口テストクリップのワニ口クリップ部分はカットして、電源ケーブルとして用います。