#include <SPI.h>
#include <SD.h>
#include <Adafruit_GFX.h>
#include <Adafruit_ST7789.h>
#define SPI_TFT_CS A2
#define SPI_DC A1
#define SPI_MISO MISO
#define SPI_MOSI MOSI
#define SPI_SCK SCK
#define SPI_TFT_RST A0
#define SPI_TFT_BL -1
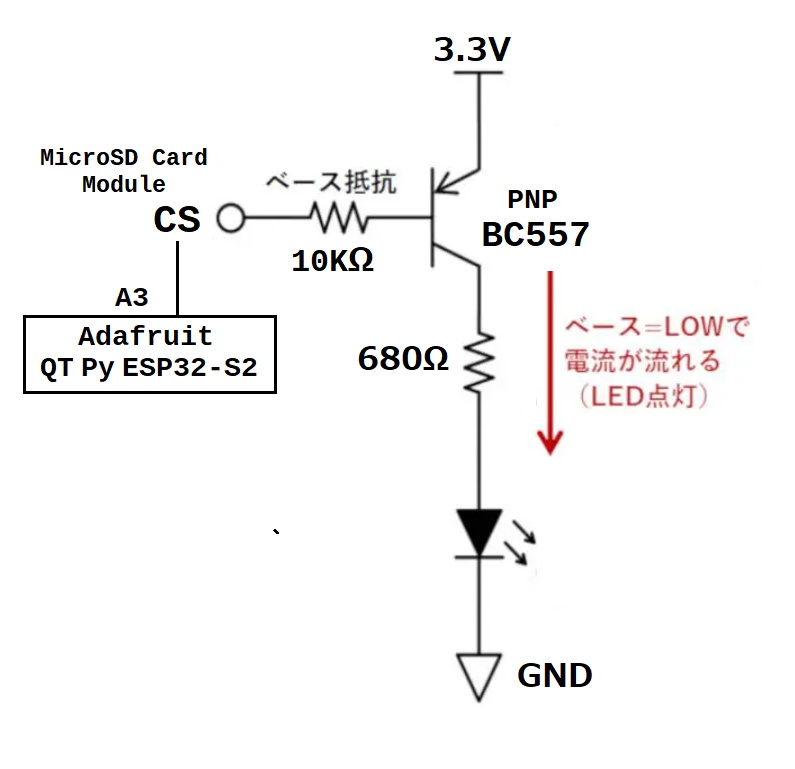
#define SPI_SD_CS A3
#define SWITCH_PIN A7
Adafruit_ST7789 tft = Adafruit_ST7789(SPI_TFT_CS, SPI_DC, SPI_MOSI, SPI_SCK, SPI_TFT_RST);
#define CLK_PIN SCL
#define DAT_PIN SDA
long DMRC1_WIDTH = 352;
long DMRC1_HEIGHT = 288;
int TFT_WIDTH = 240;
int TFT_HEIGHT = 240;
typedef struct {
uint8_t Signature[2]; // 'BM'
uint8_t FileSize[4];
uint8_t reserved1[4]; // unused (=0)
uint8_t DataOffset[4];
uint8_t Size[4]; // Size of InfoHeader =40
uint8_t Width[4];
uint8_t Height[4];
uint8_t Planes[2]; // always 1
uint8_t BitPerPixel[2];
uint8_t Compression[4];
uint8_t ImageSize[4];
uint8_t XRGBsPerM[4];
uint8_t YRGBsPerM[4];
uint8_t ColorsUsed[4];
uint8_t ImportantColors[4];
} BMP_FORMAT;
typedef struct {
uint8_t R;
uint8_t G;
uint8_t B;
} PIXEL_INFO;
BMP_FORMAT *Bmp = NULL;
PIXEL_INFO *RGBs = NULL;
SPISettings settingsST7789(24000000, MSBFIRST, SPI_MODE3);
#define HBYTE(u) ((u >> 8) & 0xFF)
#define LBYTE(u) (u & 0xFF)
void tftSendCommand(uint8_t command) {
digitalWrite(SPI_TFT_CS, LOW);
digitalWrite(SPI_DC, LOW); // Command mode
SPI.transfer(command);
}
void tftSendCommand1(uint8_t command, uint8_t data1) {
digitalWrite(SPI_TFT_CS, LOW);
digitalWrite(SPI_DC, LOW); // Command mode
SPI.transfer(command);
digitalWrite(SPI_DC, HIGH); // Data mode
SPI.transfer(data1);
digitalWrite(SPI_TFT_CS, HIGH);
}
void tftSendCommand2(uint8_t command, uint8_t data1, uint8_t data2) {
digitalWrite(SPI_TFT_CS, LOW);
digitalWrite(SPI_DC, LOW); // Command mode
SPI.transfer(command);
digitalWrite(SPI_DC, HIGH); // Data mode
SPI.transfer(data1);
SPI.transfer(data2);
digitalWrite(SPI_TFT_CS, HIGH);
}
void tftSendCommand4(uint8_t command, uint8_t data1, uint8_t data2, uint8_t data3, uint8_t data4) {
digitalWrite(SPI_TFT_CS, LOW);
digitalWrite(SPI_DC, LOW); // Command mode
SPI.transfer(command);
digitalWrite(SPI_DC, HIGH); // Data mode
SPI.transfer(data1);
SPI.transfer(data2);
SPI.transfer(data3);
SPI.transfer(data4);
digitalWrite(SPI_TFT_CS, HIGH);
}
void drawColor565(uint16_t *t565s, uint16_t width, uint16_t height)
{
uint8_t h, l;
uint16_t x, y;
SPI.beginTransaction(settingsST7789);
x = 0;
y = 0;
width--;
h = (uint8_t)(width>>8);
l = (uint8_t)(width&0x00ff);
tftSendCommand4(0x2A,x,y,h,l); // Colmun Address
height--;
h = (uint8_t)(height>>8);
l = (uint8_t)(height&0x00ff);
tftSendCommand4(0x2B,x,y,h,l); // Row Address
digitalWrite(SPI_TFT_CS, LOW);
digitalWrite(SPI_DC, LOW); // Command mode
SPI.transfer(0x2C);
digitalWrite(SPI_DC, HIGH); // Data mode
SPI.transfer(t565s, width*height*2);
digitalWrite(SPI_TFT_CS, HIGH);
digitalWrite(SPI_DC, LOW); // Command mode
SPI.endTransaction();
}
void dispStartLine(uint16_t y) {
uint8_t yH = (y >> 8) & 0xFF ;
uint8_t yL = y & 0xFF ;
digitalWrite(SPI_TFT_CS, LOW);
digitalWrite(SPI_DC, LOW); // Command mode
SPI.transfer(0x37);
digitalWrite(SPI_DC, HIGH); // Data mode
SPI.transfer(yH);
SPI.transfer(yL);
digitalWrite(SPI_TFT_CS, HIGH);
}
void init_tft() {
SPI.beginTransaction(settingsST7789);
// --- HARD Ware Reset
if (SPI_TFT_RST >= 0) {
digitalWrite(SPI_TFT_RST, HIGH);
debug_delay(50); // VDD goes high at start, pause for 500 ms
digitalWrite(SPI_TFT_RST, LOW); // Bring reset low
debug_delay(10); // Wait 100 ms
digitalWrite(SPI_TFT_RST, HIGH); // Bring out of reset
debug_delay(50); // Wait 500 ms, more then 120 ms
}
// --- SOFT Ware Reset
tftSendCommand(0x01) ; // SOFTWARE RESET
debug_delay(50);
// --- Initial Comands
tftSendCommand(0x28) ; // Display OFF
debug_delay(50);
tftSendCommand(0x11) ; // Sleep Out
debug_delay(50);
tftSendCommand1(0x3A,0x05) ; // 16Bit Pixel Mode
debug_delay(10);
tftSendCommand1(0x36,B00000000) ; // MX MY MV ML RGB MH x x:縦向き1
tftSendCommand2(0xB6,0x15,0x02) ; // Frame Rate
tftSendCommand(0x13) ; // NomalDisplayMode
tftSendCommand(0x21) ; // Display Inversion Off
tftSendCommand(0x29) ; // Display ON
// tftSendCommand1(0x36,B10100000) ;// MX MY MV ML RGB MH x x: Horizontal 1
// tftSendCommand1(0x36,B01100000) ; // MX MY MV ML RGB MH x x:Horizontal 2
// tftSendCommand1(0x36,B00000000) ; // MX MY MV ML RGB MH x x:Vertical 1
tftSendCommand1(0x36,B11000000) ; // MX MY MV ML RGB MH x x:Vertical 2
dispStartLine(82);
SPI.endTransaction();
}
void debug_delay(uint32_t msec) {
portTickType delay_ms = msec / portTICK_RATE_MS;
vTaskDelay(delay_ms);
}
void short2byte(uint8_t *pt, uint16_t val) {
*pt = (uint8_t)val &0x00ff;
*(pt+1) = (uint8_t)((val>>8)&0x00ff);
}
void long2byte(uint8_t *pt, uint32_t val) {
*pt = (uint8_t)val &0x000000ff;
*(pt+1) = (uint8_t)((val>> 8)&0x000000ff);
*(pt+2) = (uint8_t)((val>>16)&0x000000ff);
*(pt+3) = (uint8_t)((val>>24)&0x000000ff);
}
int readbit() {
int a;
digitalWrite(CLK_PIN, HIGH);
a = digitalRead(DAT_PIN);
digitalWrite(CLK_PIN, LOW);
if(a){
return 1;
} else {
return 0;
}
}
boolean saveBmpFile(const char *path)
{
long pos;
char fname[32];
static int fno = 0;
digitalWrite(SPI_SD_CS, LOW);
SPI.setFrequency(16000000); // 16MHz
if (!SD.begin(SPI_SD_CS, SPI)) return false;
while (1) {
sprintf(fname,"%s/%d.bmp",path,++fno);
if (!SD.exists(fname)) break;
}
File fileSD = SD.open(fname, "wb");
if (!fileSD) return false;
if (!Bmp) Bmp = (BMP_FORMAT *)malloc(sizeof(BMP_FORMAT));
memset(Bmp, 0x00, sizeof(BMP_FORMAT));
memcpy(&Bmp->Signature,(uint8_t*)"BM",2);
long2byte(Bmp->FileSize, sizeof(BMP_FORMAT) + DMRC1_WIDTH * DMRC1_HEIGHT * 3);
long2byte(Bmp->DataOffset, sizeof(BMP_FORMAT));
long2byte(Bmp->Size, 40);
long2byte(Bmp->Width, DMRC1_WIDTH);
long2byte(Bmp->Height, DMRC1_HEIGHT);
short2byte(Bmp->Planes, 1);
short2byte(Bmp->BitPerPixel, 24);
long2byte(Bmp->ImageSize, DMRC1_WIDTH * DMRC1_HEIGHT * 3);
long2byte(Bmp->ColorsUsed, 0);
fileSD.write((uint8_t*)Bmp, sizeof(BMP_FORMAT));
// Correction for RGB information, as one horizontal row
// of the image must be a multiple of 4 bytes
uint8_t mod = (DMRC1_WIDTH % 4) * 3;
for(int y = DMRC1_HEIGHT - 1; y >= 0; y--){
pos = DMRC1_WIDTH * y;
for(int x=0; x < DMRC1_WIDTH; x++,pos++){
fileSD.write(&RGBs[pos].B, 1);
fileSD.write(&RGBs[pos].G, 1);
fileSD.write(&RGBs[pos].R, 1);
}
if (mod>0) fileSD.write(0x00,mod);
}
fileSD.close();
SD.end();
digitalWrite(SPI_SD_CS, HIGH);
return true;
}
boolean capture()
{
unsigned short marker = 0x0;
long i,k;
int bit;
float u, y0, v, y1;
unsigned char r = 0, g = 0, b = 0;
unsigned char d;
long pos = 0;
long pos_max = DMRC1_WIDTH * DMRC1_HEIGHT;
// find start marker
while((marker & 0xffff) != 0xaa55) {
marker <<= 1;
if(readbit()) marker |= 0x01;
}
// skip 28 bytes
for(i=0; i<28*8; i++) readbit();
// check data start marker
marker = 0; bit = 0;
while (1) {
if(readbit()) marker |= 0x01;
if ((++bit)<16) {
marker <<= 1;
} else {
break;
}
}
if (marker != 0x55aa) {
return false;
}
for( k=0; k < DMRC1_WIDTH * DMRC1_HEIGHT * 4; k++) {
d = 0;
for (i=0; i<8; i++) {
d <<= 1;
if(readbit()) d |= 0x1;
}
switch (k%4) {
case 0:
u = d;
break;
case 1:
y0 = d;
break;
case 2:
v = d;
break;
case 3:
y1 = d;
r = y0 + 1.140*(v - 128);
g = y0 - 0.394*(u - 128) - 0.581*(v - 128);
b = y0 + 2.032*(u - 128);
if(255 < r) r = 255;
if(r < 0) r = 0;
if(255 < g) g = 255;
if(g < 0) g = 0;
if(255 < b) b = 255;
if(b < 0) b = 0;
if (pos < pos_max) {
RGBs[pos].R = r;
RGBs[pos].G = g;
RGBs[pos].B = b;
}
r = y1 + 1.140*(v - 128);
g = y1 - 0.394*(u - 128) - 0.581*(v - 128);
b = y1 + 2.032*(u - 128);
if(255 < r) r = 255;
if(r < 0) r = 0;
if(255 < g) g = 255;
if(g < 0) g = 0;
if(255 < b) b = 255;
if(b < 0) b = 0;
if (pos < pos_max) {
RGBs[pos+1].R = r;
RGBs[pos+1].G = g;
RGBs[pos+1].B = b;
pos+=2;
}
break;
}
}
return true;
}
void show()
{
uint16_t from_w, to_w, from_h, to_h;
uint16_t color565;
long pos1 = 0;
long pos2 = 0;
from_h = (DMRC1_HEIGHT - TFT_HEIGHT)/2;
to_h = from_h + TFT_HEIGHT;
from_w = (DMRC1_WIDTH - TFT_WIDTH)/2;
to_w = from_w + TFT_WIDTH;
uint16_t *color565s = (uint16_t*)malloc(TFT_WIDTH * TFT_HEIGHT * 2);
if (color565s) {
for (int y = 0; y < DMRC1_HEIGHT; y++) {
for (int x = 0; x < DMRC1_WIDTH; x++) {
if ((y >= from_h)&&(y < to_h)&&(x >= from_w)&&(x < to_w)) {
color565 = ((RGBs[pos1].R >> 3)<<11) | ((RGBs[pos1].G >> 2)<<5) | (RGBs[pos1].B >> 3);
color565s[pos2] = ((color565>>8)&0x00FF)|((color565<<8)&0xFF00);
pos2++;
}
pos1++;
}
}
drawColor565(color565s,TFT_WIDTH,TFT_HEIGHT);
free(color565s);
}
}
void setup()
{
pinMode(CLK_PIN, OUTPUT);
pinMode(DAT_PIN, INPUT);
pinMode(SPI_SD_CS, OUTPUT);
pinMode(SPI_TFT_CS, OUTPUT);
pinMode(SPI_DC, OUTPUT);
pinMode(SPI_TFT_RST, OUTPUT);
pinMode(SWITCH_PIN, INPUT );
digitalWrite(SPI_SD_CS, HIGH);
RGBs = (PIXEL_INFO *)malloc(DMRC1_WIDTH * DMRC1_HEIGHT * 3);
if (!RGBs) while(1);
if (SPI_TFT_BL != -1) {
ledcSetup(0,12800,8);
ledcAttachPin(SPI_TFT_BL,0);
ledcWrite(0,64);
}
SPI.begin();
init_tft();
}
void loop()
{
if ( capture() ) {
show();
if (!digitalRead(SWITCH_PIN)) {
saveBmpFile("/dmrc1");
}
}
}