KCX Bluetooth Emitter
2025.06.23
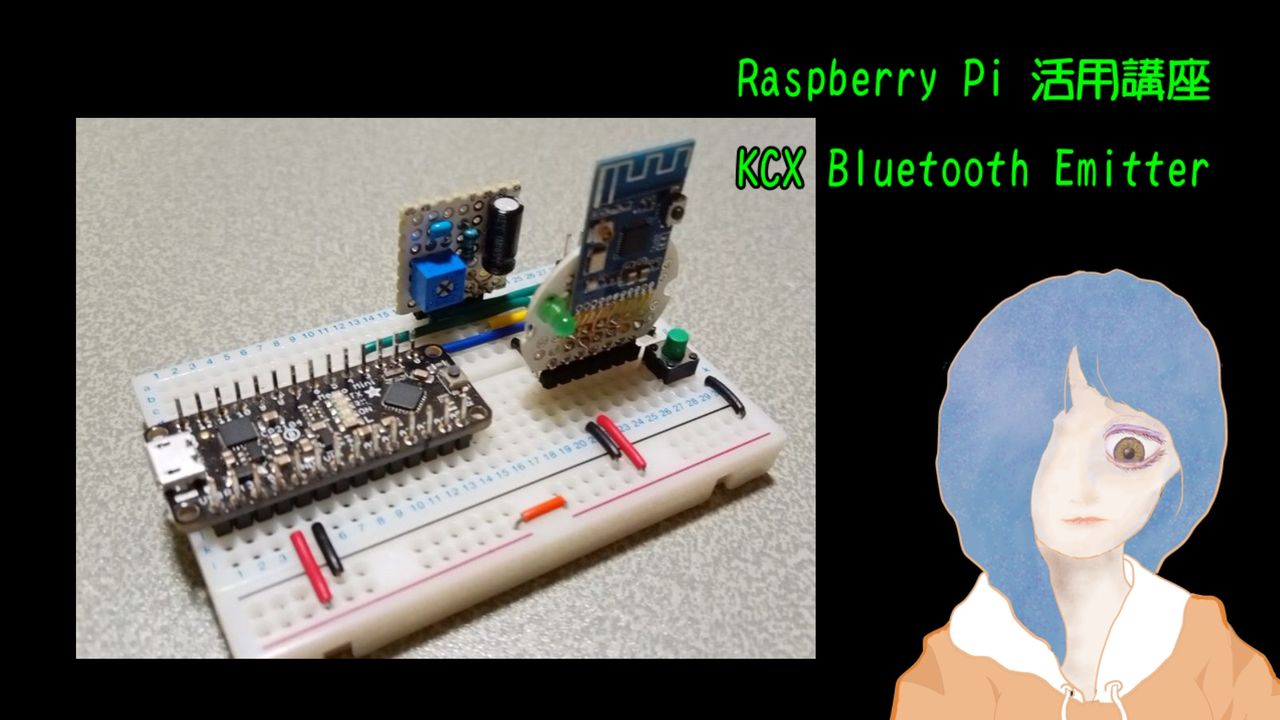
YouTube でも紹介しています。画像をクリックすると再生できます。
●KCX Bluetooth Emitter
KCX Bluetooth Emitter は、Bluetoothトランスミッターおよびレシーバーとして機能します。
今回は、DFPlayerからのオーディオ出力をKCXを介して、Bluetoothスピーカーで再生させます。
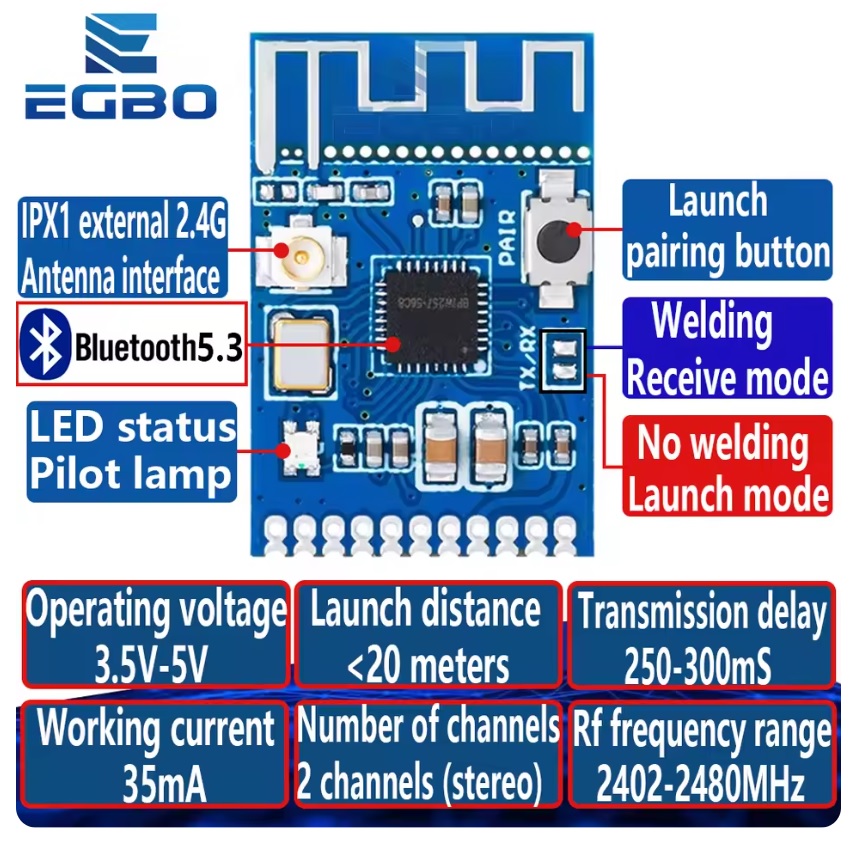
 KCX_BT_EMITTER Low cost bluetooth (BT) audio module
KCX_BT_EMITTER Low cost bluetooth (BT) audio module
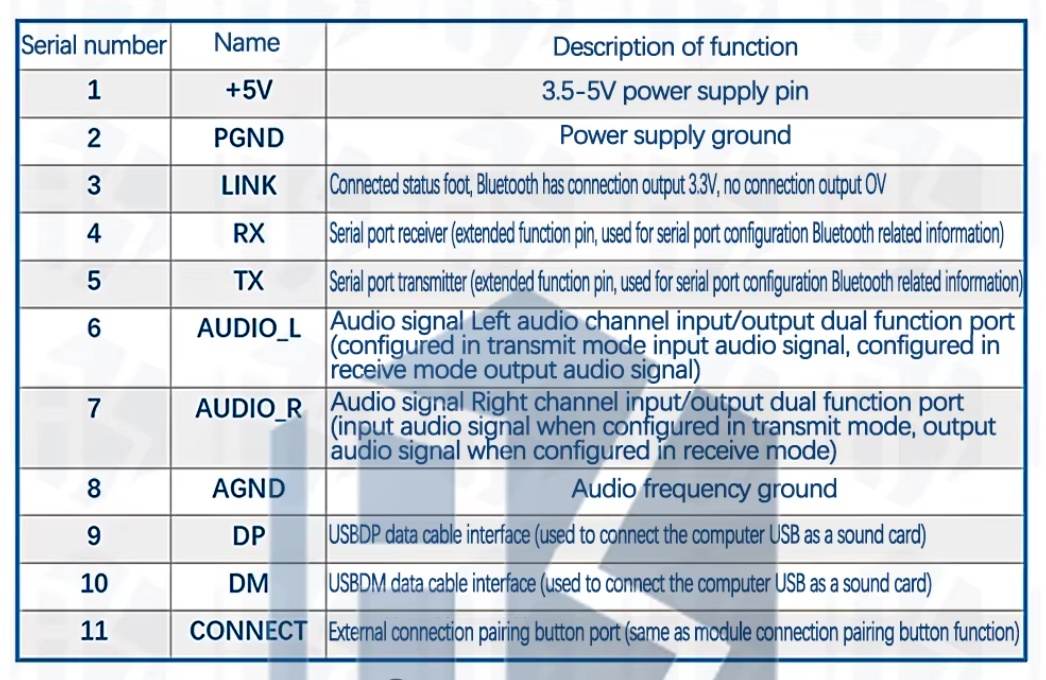
仕様
・製品モデル: kcx _ emiter
・動作電圧: 3.5-5v
・稼働電流: 35ma
・発射距離: 20メートル以下
・RF出力電力: + 5dbm RF周波数範囲: 2402-2480mhz
・オーディオダイナミック範囲: 80db
・オーディオ総調波歪み:-70db
・オーディオ周波数レスポンス: 20hz-20khz
・オーディオの信号対ノイズ比: 95db
・オーディオ入力および出力信号の強度: 2vpp以下チャンネル数: 2チャンネル (ステレオ)
・伝送遅延: 250-300ms
・ピッチ間隔:約1.25mm
・寸法: 23.5x15.5mm
●前準備 DFPlayer Mini
Bluetoothスピ―カ―での再生テスト用音源として利用します。
DFPLAYERに関しては豊富な情報が公開されているので、そちらをご覧ください。
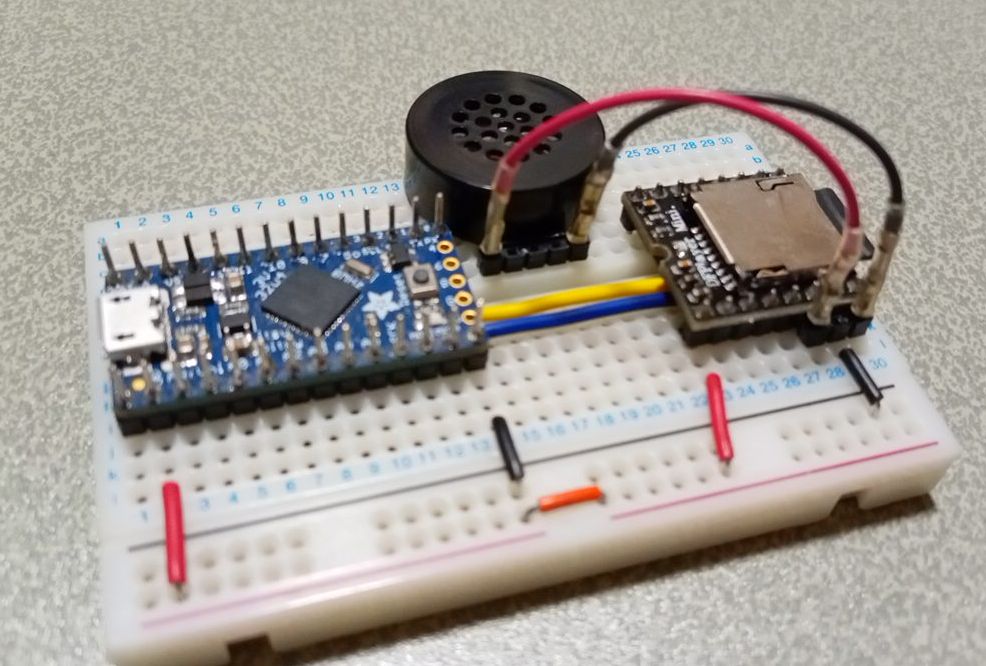
DFPlayerのI/Oは3,3Vなので、マイコンには Adafruit ItsyBitsy 32u4 - 3V 8MHz を使っています。
スピーカーに繋いでいる2本のワイヤーを外して、赤線(+)→AUDIO_R、黒線(-)をAUDIO_Lに繋ぎ変えます。
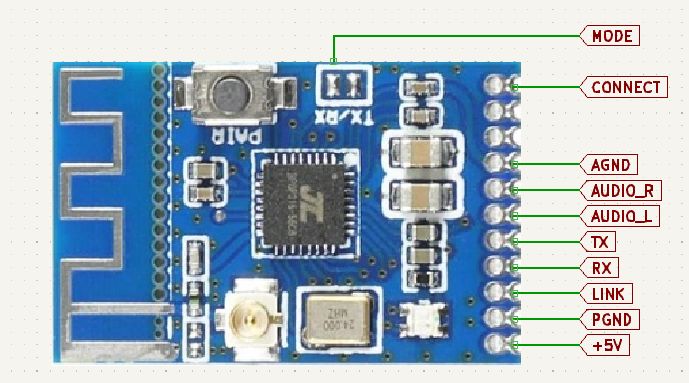
●KCX Bluetooth Emitter ピン配置
USB接続の場合
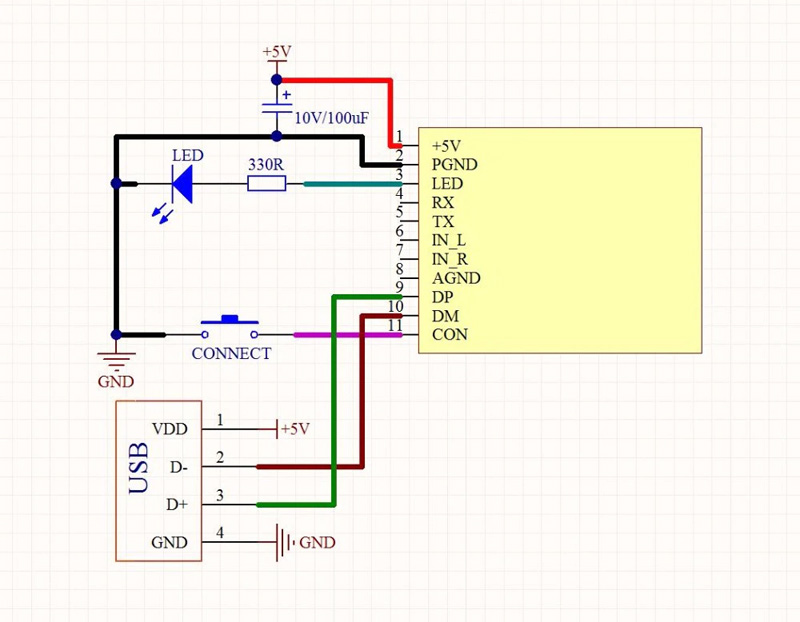
WindowsのUSBポートに接続して使用する際の接続です。
シリアル接続の場合
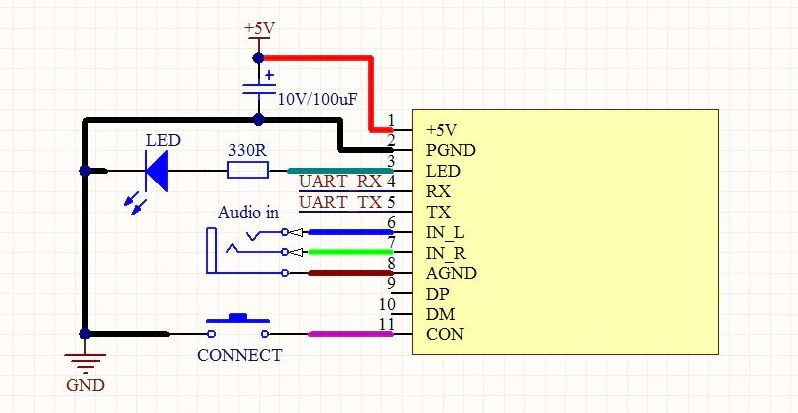
UART端子を利用する際の接続図です。このシリアル端子をマイコンと直接接続して使用します。
・9:DP, 10:DM シリアル接続を利用するので使用しません。
・3:LINK Bluetoothスピーカーに接続された際にHIGHになるので、LEDをつなぎ、2:PGNDに落としています。
・8:AGND Audioグランドも2:PGNDに落とします。
これにより外部接続端子は7つに集約されます。
| ARDUINO | | 変換基板PIN | | KCX BT EMITTER |
|---|
| 5V | ━ | 2 | ━ | 1:+5V |
| GND | ━ | 1 | ━ | 2:PGND |
| | | | | 3:LINK-680Ω-LED→PGND |
| 3:TxD | ━ | 3 | ━ | 4:RX |
| 2:RxD | ━ | 4 | ━ | 5:TX |
| | | 6 | ━ | 6:AUDIO_L |
| 8-分圧抵抗 | ━ | 5 | ━ | 7:AUDIO_R |
| | | | | 8:AGND→PGND |
| GND-スイッチ | ━ | 7 | ━ | 11:CONNECT |
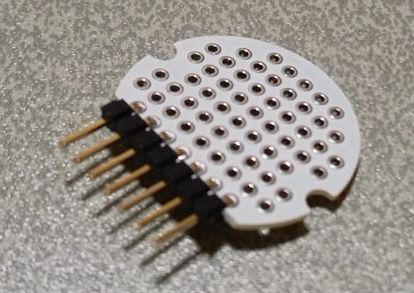
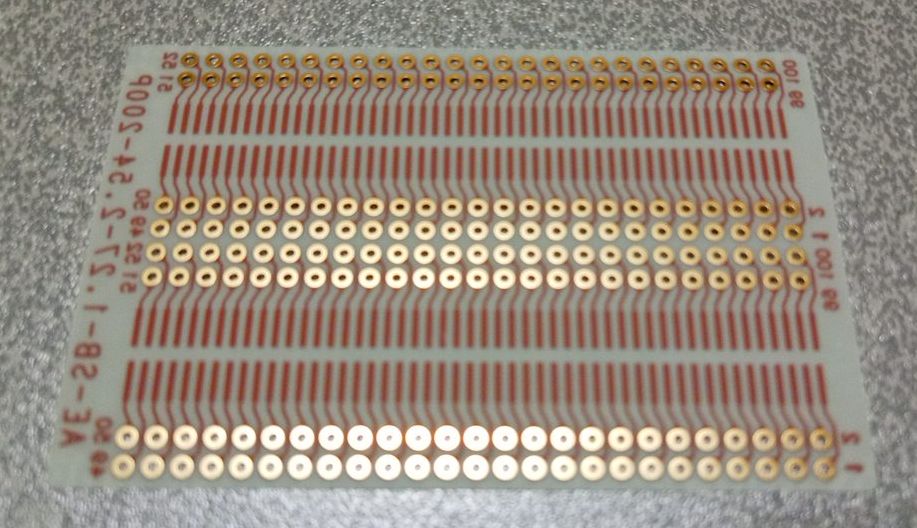
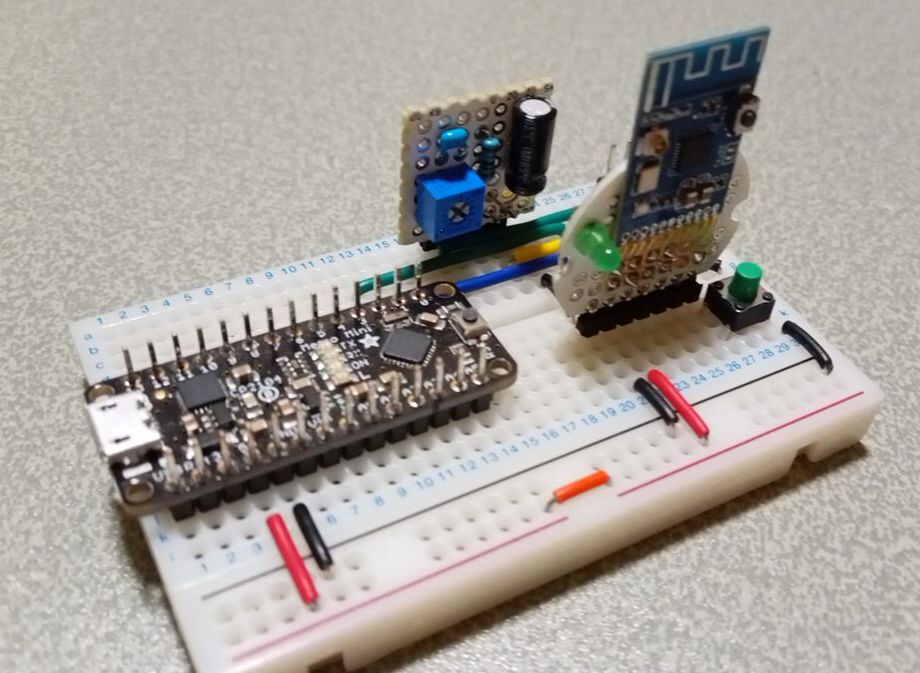
ユニバーサル基板
KCXボードは、1.27mmピッチなので、ブレッドボードに挿せるように2.54ピッチに変換します。

最下行5穴をカットして7穴にL型ピンヘッダーをはんだ付けします
KCXモジュールのDIP変換

 裏面をみると、スルーホール以外の部分は絶縁されていて、ユニバーサル基板に重ねてもショートすることはありません
裏面をみると、スルーホール以外の部分は絶縁されていて、ユニバーサル基板に重ねてもショートすることはありません
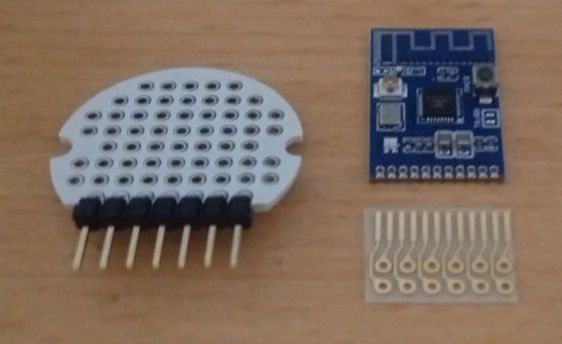 12ピン分をハサミで切り取って、基板にはんだ付けます
12ピン分をハサミで切り取って、基板にはんだ付けます

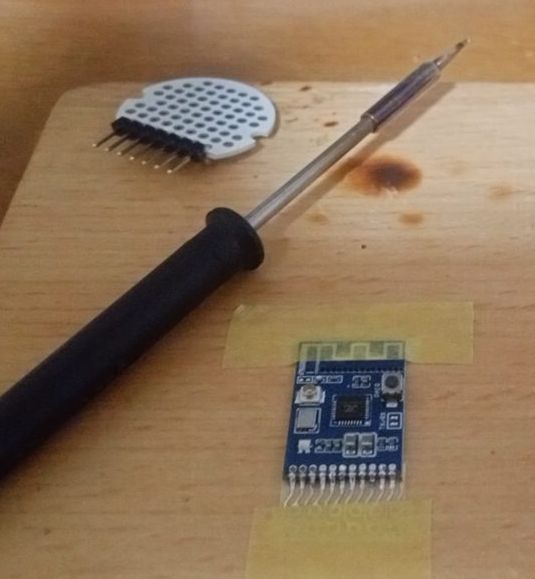
低ボルトはんだごて MI-6-12V【goot】
1.27㎜ピッチの基板には、MINIATURE SOLDERING IRONを使うと容易にはんだ付けを行うことができます
 念のため、剥離防止に基板が重なっている部分にポリイミドテープを貼っています。
念のため、剥離防止に基板が重なっている部分にポリイミドテープを貼っています。
また、その上の部分に両面テープで円形基板に貼り付けます。
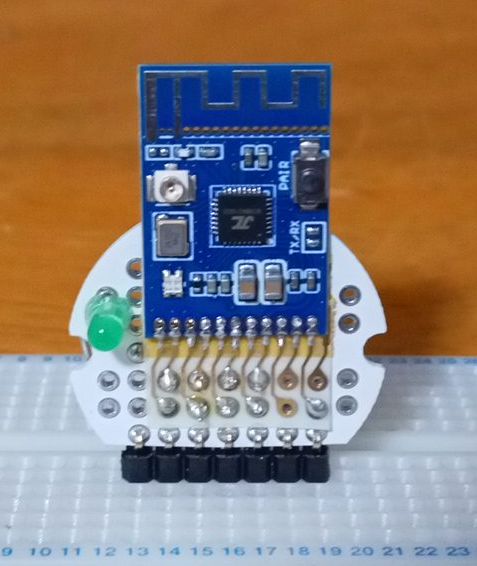
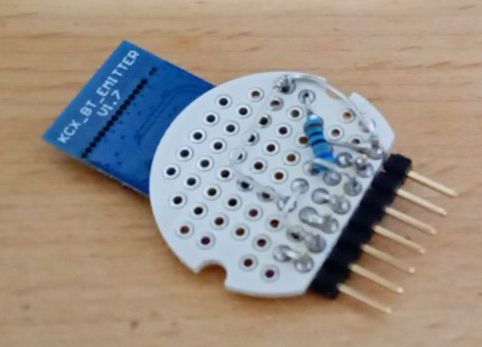
KCXボード3番LINK端子に680Ω抵抗を経由してLEDをはんだ付けし、2番PGNDに落としています
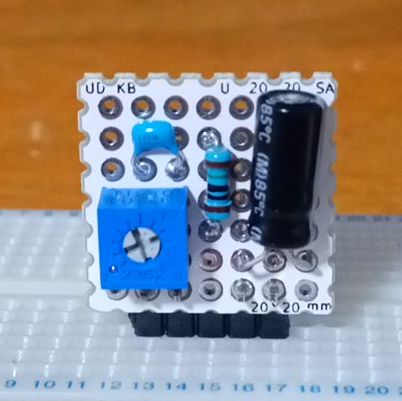
●分圧により音量をさげるモジュール
KCX Bluetooth Emitter をレシーバーとして使用する際は、音量を設定することができるようですが、
トランスミッターとして使う場合の音量設定はないようです。
DFPlayer Miniには音量調節機能がありますが、かなり音量を絞ってもKCX経由でBluetoothスピーカーで再生してみるとかなり大きな音になってしまうことがあります。
そこで、外部オーディオ機器からの入力を分圧により減圧します。
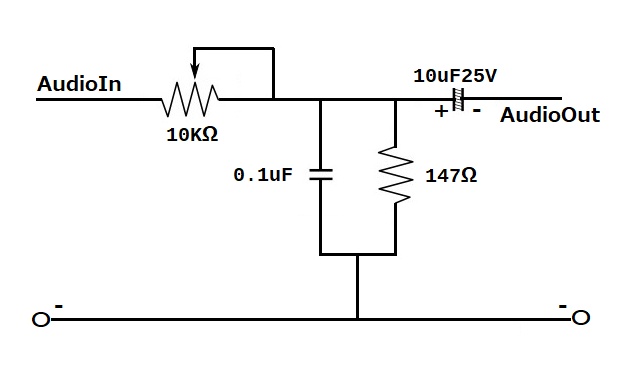
ここで重要なのが、0.1uFのキャパシタです。これを挟むことでバックノイズがかなり消えます。
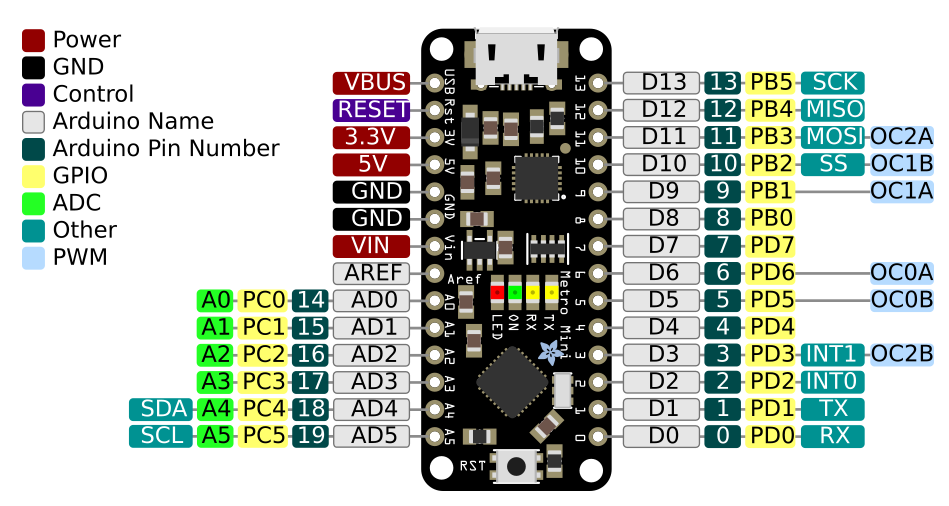
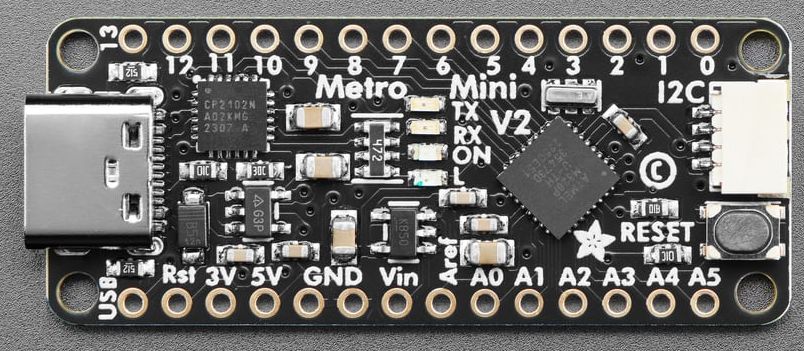
●Adafruit Metro Mini 328 - 5V 16MHz
KCXの動作電圧は 3.5~5v です。マイコンボードには Arduino UNO や NANO が使用できます。
・ATmega328 microcontroller with Optiboot (UNO) Bootloader
・USB Programming and debugging via the well-supported genuine FTDI FT231X
・Input voltage (Vin): 6-16V (a 9VDC power supply is recommended)
・5V logic with 3.3V compatible inputs, can be converted to 3.3V logic operation
・20 Digital I/O Pins: 6 are also PWM outputs and 6 are also Analog Inputs
・32KB Flash Memory - 0.5K for bootloader, 31.5KB available after bootloading
・16MHz Clock Speed
●Pinout
Adafruit Metro Mini
The bottom row has 6 power pins that you will find handy!
・USB is connected directly to the micro USB connector, and is great when you need a lot of 5V power for NeoPixels or servos, etc. If USB is not plugged in, this will not be powered
・3V this is the 3V regulator ouput. On the FTDI-using Metro Mini, this will be 50mA output. On the CP2104-using Metro Mini it will be 500mA max output. Note you can only get 500mA out when its plugged into USB
・5V is the 5V output. If powered from USB, it is powered from USB power through a Schottkey diode. If you are only powering from Vin, it will give you up to 150mA of current out
・Vin is the battery input. You can provide 5V to 16V input. Note that we linearly regulate this down, so using a higher voltage will cause your board to heat up more. 5-8V is a good place to stay.
You can connect both USB and Vin power, and the metro will automatically switch between the two to maintain the highest voltage output on 5V out.
●Voltage Select Jumper

On the bottom of the board, there is a Vio jumper, which you can see ties the middle pad to 5V. If you want to use your Metro Mini in 3V logic mode - which can really simplify connecting to many chips, sensors, and displays - cut the little trace to the left, and solder the middle pad and right pad together. Use a multimeter to check that you really cut that trace, as shorting 3V and 5V together is very bad and may damage your Mini!
ボード上には赤色 LED があります、
Bluetoothスピーカーに接続されていないときは高速点滅、接続されると低速点滅(実際には2回の点滅と長めの休止)するとともに、7番端子に接続されているLEDが点灯します。
接続後にデバイスの電源をオフにして接続が切断されると、LEDはスキャン状態に戻り、高速点滅します。
DFPlayer からの入力レベルを分圧により減圧しない場合は、
KCXの7番AUDIO_Rピンと2番PGNDの間に100uF/16Vのコンデンサを挟むと、バックグランド・ノイズが劇的に改善されます。
11番CONNECTにタクトスイッチを付けて、GNDに落としています。
スイッチが押されると自動接続リストが削除され、デバイスのスキャンが開始されます。
●Bluetoothスピーカー

| Bluetooth Version: | Bluetooth V5.0 |
| Speaker Parameter: | 4Ω2W diameter 28mm |
| Transmitting Frequency: | 20Hz - 20KHz |
| Battery: | 3.7V/200mAh |
| S/N: | => 90DB |
| THD: | <1% |
| Charging Time: | 2-3 Hours |
| Play Time: | 1 Hour |
| Product Size: | φ34x28.5mm |
| Product Weight: | 33g |
MACアドレスの確認
 KCXモジュールでは、認識できたBluetoothデバイスのMACアドレスを取得することができますが、
事前にスマホを用いて使用するBluetoothスピーカーのMACアドレスを確認しておきます。
KCXモジュールでは、認識できたBluetoothデバイスのMACアドレスを取得することができますが、
事前にスマホを用いて使用するBluetoothスピーカーのMACアドレスを確認しておきます。
●サンプルプログラム
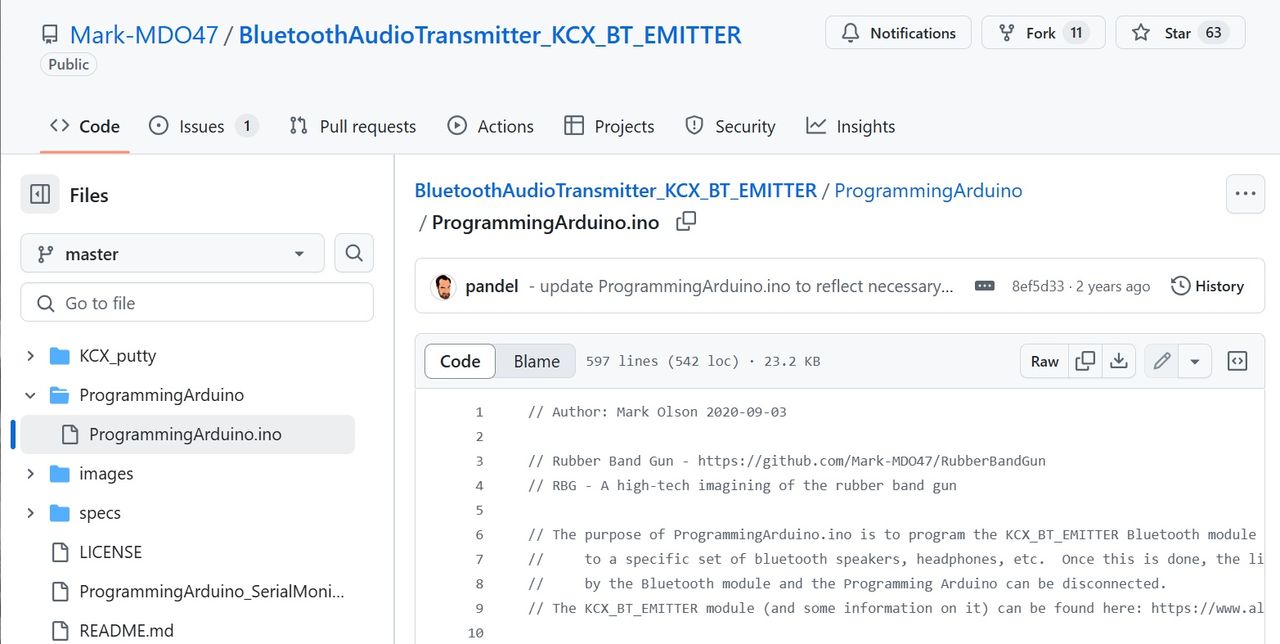
ProgrammingArduino.ino
●開発環境
ソースコードのビルドには、PlatformIOを使用しています。
Arduino開発環境構築 PlatformIO
●ProgrammingArduino.ino の編集
ソフトウェア・シリアルのポート番号を環境に合わせて変更します
#define DPIN_BLUESRL_RX 2
#define DPIN_BLUESRL_TX 3
SoftwareSerial myBlueSerial(DPIN_BLUESRL_RX, DPIN_BLUESRL_TX);
その他、多くの箇所を変更しています。
void processCommand() {
........
switch (inBytes[0]) {
........
case '8': // 7 - PowerOff module");
Serial.println("\n8=Auto Connect Setting");
sendBlueCmd("AT+");
sendBlueCmd("AT+DISCON");
sendBlueCmd("AT+DELVMLINK");
sendBlueCmd("AT+ADDLINKADD=0f1939d72316");
sendBlueCmd("AT+ADDLINKNAME=HW-BT");
sendBlueCmd("AT+ADDLINKADD=014d0b2d4241");
sendBlueCmd("AT+ADDLINKNAME=MT");
loopReportBlueCom();
break;
........
自動接続リストは所有するBluetoothスピーカーに合わせて変更してください、
ProgrammingArduino.ino (改造版)
//////////////////////////////////////////////////////////////////////////////////////
// KCX_BT_EMITTER v1.7
// Author: Mark Olson 2020-09-03
// Rubber Band Gun - https://github.com/Mark-MDO47/RubberBandGun
// When running the sketch, you can select steps in any order as follows:
// https://item.taobao.com/item.htm?spm=a21wu.12321156-tw.0.0.7e76d1c7xEOcFZ&id=570274835710
// https://www.electro-tech-online.com/threads/kcx_bt_emitter-low-cost-bluetooth-bt-audio-module.158156/
#include "Arduino.h"
#include "SoftwareSerial.h" // to talk to KCX_BT_EMITTER without using up debug serial port
#define DPIN_BLUESRL_RX 2 // serial in - talk to Bluetooth module (KCX_BT_EMITTER) - connect to YELLOW wire
#define DPIN_BLUESRL_TX 3 // serial out - talk to Bluetooth module (KCX_BT_EMITTER) - connect to GREEN wire
SoftwareSerial BTSerial(DPIN_BLUESRL_RX, DPIN_BLUESRL_TX); // to talk to Bluetooth
SoftwareSerial DFSerial(10, 11); // RX, TX
#define NUMWAIT 500 // loopcount waiting for response from Bluetooth module
#define NUMOF(a) (sizeof((a)) / sizeof(*(a)))
uint8_t DEBUG_SERIAL_IN = 0; // 1 to debug the serial input code
char inBytes[100];
char cmd_bld_ADDLINKADD[32]; // must build these in RAM from user input
char cmd_bld_ADDLINKNAME[64]; // must build these in RAM from user input
void setup() {
Serial.begin(115200); // this is for general debug
while (!Serial); // wait for serial port to connect. Needed for native USB port only
BTSerial.begin(115200); // this is control for Bluetooth module (KCX_BT_EMITTER)
}
void loop() {
static uint8_t menuPrinted = 0;
if (0 == menuPrinted) {
menuPrinted = 1;
Serial.println("");
Serial.println(" 1 - Scan for Bluetooth receiver devices (such as speaker, headphones, etc.)");
Serial.println(" 2 - Display stored auto-connect Bluetooth receiver devices");
Serial.println(" 3 - Add one auto-connect Bluetooth receiver device to storage");
Serial.println(" 4 - Delete all auto-connect Bluetooth receiver devices from storage");
Serial.println(" 5 - Current status");
Serial.println(" 6 - BT Disconnect");
Serial.println(" 7 - PowerOff module");
Serial.println(" 8 - Auto Connect Setting");
Serial.print("==> ");
}
if (Serial.available()) {
menuPrinted = 0;
processCommand();
}
}
/////////////////////////////////////////////////////////////////////////////////////////////////////////
// processCommand(uint8_t theChoice)
// performs one of the four menu options
// as needed, reports scan info from Bluetooth
//
void processCommand() {
uint8_t addlinkOk = 0;
getSerial_chars();
reportBlueCom();
switch (inBytes[0]) {
case '1': // 1 - Scan for Bluetooth receiver devices (such as speaker, headphones, etc.)");
Serial.println("\n1=SCAN");
sendBlueCmd("AT+");
sendBlueCmd("AT+RESET");
sendBlueCmd("AT+");
// Scan for any visible Bluetooth devices
sendBlueCmd("AT+PAIR");
delay(100);
// need to hang around a little more
loopReportBlueCom();
break;
case '2': // 2 - Display stored auto-connect Bluetooth receiver devices");
Serial.println("\n2=DISPLAY");
sendBlueCmd("AT+");
// sending this command returns all information recorded in the automatically reconnect MAC and device name memory.
sendBlueCmd("AT+VMLINK?");
delay(500);
break;
case '3': // 3 - Add one auto-connect Bluetooth receiver device to storage");
// You can have up to 10 auto-connect Bluetooth receiver devices in storage
// The Bluetoth module will connect to the first device it finds in order
// NOTE: must be exactly 12 characters for hex string
Serial.println("\n3=ADD");
addlinkOk = buildADDLINKADD(cmd_bld_ADDLINKADD, NUMOF(cmd_bld_ADDLINKADD) - strlen("AT+ADDLINKADD="));
if (0 != addlinkOk) {
reportBlueCom();
addlinkOk = buildADDLINKNAME(cmd_bld_ADDLINKNAME, NUMOF(cmd_bld_ADDLINKNAME) - strlen("AT+ADDLINKNAME=") - 2);
}
if (0 != addlinkOk) {
reportBlueCom();
sendBlueCmd("AT+");
sendBlueCmd("AT+DISCON");
sendBlueCmd("AT+VMLINK?");
// associate the Bluetooth device name with internal list of MAC addresses for auto-connection
// Set the memory. When the module is started , it will search the MAC address of the device and the MAC address of the recording area.
// The address is automatically connected to any one of the MAC addresses of the recording area,
// and is not connected when the address is not consistent, so as to achieve the specified MAC address connection.
sendBlueCmd(cmd_bld_ADDLINKADD);
sendBlueCmd(cmd_bld_ADDLINKNAME);
// sendBlueCmd("AT+RESET");
sendBlueCmd("AT+");
sendBlueCmd("AT+VMLINK?");
// need to hang around a little more
loopReportBlueCom();
} else {
reportBlueCom();
Serial.println("");
Serial.println("User aborted storing MAC address for the Bluetooth speaker or headphones\n");
}
break;
case '4': // 4 - Delete all auto-connect Bluetooth receiver devices from storage");
Serial.println("\n4=DELETE ALL");
sendBlueCmd("AT+");
sendBlueCmd("AT+DISCON");
sendBlueCmd("AT+DELVMLINK");
sendBlueCmd("AT+RESET");
sendBlueCmd("AT+");
sendBlueCmd("AT+VMLINK?");
loopReportBlueCom();
break;
case '5': // 5 - Show current status");
Serial.println("\n5=STATUS");
sendBlueCmd("AT+");
sendBlueCmd("AT+GMR?");
sendBlueCmd("AT+BAUD?");
sendBlueCmd("AT+STATUS?");
loopReportBlueCom();
break;
case '6': // 6 - Disconnect current BT");
Serial.println("\n6=Disconnect");
sendBlueCmd("AT+");
sendBlueCmd("AT+DISCON");
loopReportBlueCom();
break;
case '7': // 7 - PowerOff module");
Serial.println("\n7=PowerOff module");
sendBlueCmd("AT+");
sendBlueCmd("AT+POWER_OFF");
loopReportBlueCom();
break;
case '8': // 7 - PowerOff module");
Serial.println("\n8=Auto Connect Setting");
sendBlueCmd("AT+");
sendBlueCmd("AT+DISCON");
sendBlueCmd("AT+DELVMLINK");
sendBlueCmd("AT+ADDLINKADD=0f1939d72316");
sendBlueCmd("AT+ADDLINKNAME=HW-BT");
sendBlueCmd("AT+ADDLINKADD=014d0b2d4241");
sendBlueCmd("AT+ADDLINKNAME=MT");
loopReportBlueCom();
break;
case 'A': // AT Command
Serial.print("\n");
if (strncmp(inBytes,"AT+",3)==0) {
sendBlueCmd(inBytes);
loopReportBlueCom();
}
break;
} // end switch()
Serial.println("\n--- KCX_BT_EMITTER PROGRAMMING STEP COMPLETE ---");
} // end processCommand()
/////////////////////////////////////////////////////////////////////////////////////////////////////////
// buildADDLINKADD(char * cmdAddr, uint16_t cmdMaxLen)
// builds a RAM AT+ADDLINKADD command from user input
//
// NOTE: the hex MAC Address sent in the AT command must be exactly 12 characters
//
uint8_t buildADDLINKADD(char *cmdAddr, uint16_t cmdMaxLen) {
char myLowerCase[15]; // never want to over-run
uint8_t myNumChars = 0;
uint8_t myStart = 0;
char const *zeroFill = "000000000000";
Serial.println("");
Serial.println("Enter the unique MAC address for the Bluetooth speaker or headphones; it starts with 0x");
Serial.println(" upper or lower case does not matter; maximum of 12 characters after the 0x");
Serial.println("To abort adding an auto-connect Bluetooth receiver device to storage, just enter an empty line");
Serial.print("==> ");
while (!Serial.available()); // wait
// reportBlueCom();
myNumChars = getSerial_chars();
if (0 == myNumChars) return (0); // abort
if (('0' == inBytes[0]) && ('x' == tolower(inBytes[1]))) myStart = 2;
myNumChars -= myStart;
if (DEBUG_SERIAL_IN) {
Serial.print(" input string |");
Serial.print(inBytes);
Serial.print("| myStart ");
Serial.print(myStart);
Serial.print(" myNumChars ");
Serial.println(myNumChars);
} // end if (DEBUG_SERIAL_IN)
if (myNumChars > 12) {
Serial.println("Abort - more than 12 characters");
return (0); // abort
}
for (int j = myStart; (j < (myNumChars + myStart)) && (0 != inBytes[j]); j++) {
if (0 == isxdigit(inBytes[j])) {
Serial.print("Abort - non-hex digit: ");
Serial.print(inBytes[j]);
Serial.print(" j ");
Serial.println(j);
return (0); // abort
}
myLowerCase[j] = tolower(inBytes[j]);
}
myLowerCase[myNumChars + myStart] = 0;
Serial.print("\nYour entry \"");
Serial.print(inBytes);
Serial.println("\" was accepted");
// strcpy(cmdAddr, "AT+ADDLINKADD=0x");
strcpy(cmdAddr, "AT+ADDLINKADD=");
strcat(cmdAddr, &zeroFill[myNumChars]);
strcat(cmdAddr, &myLowerCase[myStart]);
return (1); // successful command build
} // end buildADDLINKADD()
/////////////////////////////////////////////////////////////////////////////////////////////////////////
// buildADDLINKNAME(char * cmdAddr, uint16_t cmdMaxLen)
// builds a RAM AT+ADDLINKNAME command from user input
//
uint8_t buildADDLINKNAME(char *cmdAddr, uint16_t cmdMaxLen) {
uint8_t myNumChars = 0;
char const *zeroFill = "000000000000";
Serial.println("");
Serial.println("Enter the name you choose for this device; it is OK to place spaces between words");
Serial.println(" maximum of 20 characters total");
Serial.println("To abort adding an auto-connect Bluetooth receiver device to storage, just enter an empty line");
Serial.print("==> ");
while (!Serial.available()); // wait
// reportBlueCom();
myNumChars = getSerial_chars();
if (0 == myNumChars) return (0); // abort
if (myNumChars > 20) {
Serial.println("Abort - more than 20 characters");
return (0); // abort
}
Serial.print("\nYour entry \"");
Serial.print(inBytes);
Serial.println("\" was accepted");
strcpy(cmdAddr, "AT+ADDLINKNAME=");
strcat(cmdAddr, inBytes);
return (1); // successful command build
} // end buildADDLINKNAME()
/////////////////////////////////////////////////////////////////////////////////////////////////////////
// getSerial_chars()
// gets character string from USB serial; removes EOL chars; stores in inBytes[] zero terminated
//
// returns number of characters in inBytes
//
// no code to flag input over-run
// stores zero-terminated string in inBytes
//
uint8_t getSerial_chars() {
static unsigned char myChar;
static uint8_t idx = 0;
idx = 0;
while (1) {
if (Serial.available()) {
myChar = Serial.read();
if (DEBUG_SERIAL_IN) {
Serial.print("\n getSerial_chars got myChar 0x");
Serial.print(myChar, HEX);
} // end if(DEBUG_SERIAL_IN)
if (((int)myChar) >= 0x20) { // if it is space or higher
Serial.write(myChar);
if (DEBUG_SERIAL_IN) Serial.print(" >= 0x20 ");
if ((idx + 2) <= NUMOF(inBytes)) {
inBytes[idx++] = myChar;
if (DEBUG_SERIAL_IN) {
Serial.print("count of inBytes #");
Serial.println(idx);
} // end if(DEBUG_SERIAL_IN)
} else {
if (DEBUG_SERIAL_IN) {
Serial.print(" not stored; idx ");
Serial.print(idx);
Serial.print(" not stored; NUMOF(inBytes) ");
Serial.println(NUMOF(inBytes));
} // end if(DEBUG_SERIAL_IN)
}
delay(5);
} else {
delay(5);
if (DEBUG_SERIAL_IN) {
Serial.print(" --- not stored! Count of inBytes #");
Serial.println(idx);
} // end if(DEBUG_SERIAL_IN)
while (Serial.available()) {
myChar = Serial.read();
delay(5);
}
break;
}
} // end try to read input to the end of line
}
inBytes[idx] = 0;
if (DEBUG_SERIAL_IN) {
Serial.print("\n getSerial_chars idx ");
Serial.print(idx);
Serial.print(" inBytes[idx] 0x");
Serial.print(inBytes[idx], HEX);
Serial.print(" inBytes |");
Serial.print(inBytes);
Serial.println("|");
} // end if(DEBUG_SERIAL_IN)
return (idx);
} // end getSerial_chars()
/////////////////////////////////////////////////////////////////////////////////////////////////////////
// getSerial_uint8_t()
// gets single-digit decimal number from USB serial; returns the number itself (not ASCII)
//
uint8_t getSerial_uint8_t() {
getSerial_chars();
if (DEBUG_SERIAL_IN) {
Serial.print("\n getSerial_uint8_t inBytes[0] 0x");
Serial.print(inBytes[0], HEX);
Serial.print(" converted to ");
Serial.println(uint8_t(inBytes[0] - 0x30), HEX);
} // end if(DEBUG_SERIAL_IN)
return (uint8_t(inBytes[0] - 0x30)); // subtract ASCII 0
} // end getSerial_uint8_t()
/////////////////////////////////////////////////////////////////////////////////////////////////////////
// sendBlueCmd( char * cmd )
// Sends one AT-style zero-terminated string to the Bluetooth module
//
void sendBlueCmd(char *cmd) {
Serial.println(cmd); // send this before sending to device
// BTSerial.println(cmd);
while (*cmd) {
BTSerial.write(*cmd);
cmd++;
}
BTSerial.write(0x0d);
BTSerial.write(0x0a);
loopReportBlueCom();
} // end sendBlueCmd()
/////////////////////////////////////////////////////////////////////////////////////////////////////////
// reportBlueCom()
// Reports back any response or scan output from the Bluetooth module
// Returns number of characters seen
//
unsigned int reportBlueCom() {
unsigned int idx = 0;
unsigned int odx = 0;
while (BTSerial.available()) inBytes[idx++] = BTSerial.read();
if (idx > 0) {
odx = 0;
for (odx = 0; odx < idx; odx += 1) {
Serial.write(inBytes[odx]);
delay(5); // Waiting time to prevent garbled characters
}
} // if anything received from Bluetooth chip
return (idx);
} // end reportBlueCom()
/////////////////////////////////////////////////////////////////////////////////////////////////////////
// loopReportBlueCom()
// Loops reporting back any response or scan output from the Bluetooth module
// Returns number of characters seen on the last loop
//
unsigned int loopReportBlueCom() {
int loopIdx;
unsigned int numBytes;
for (loopIdx = 0; loopIdx < NUMWAIT; loopIdx += 1) {
numBytes = reportBlueCom();
delay(5);
}
return (numBytes);
} // end loopReportBlueCom()
$ pio init -b metro
$ pio run -t upload
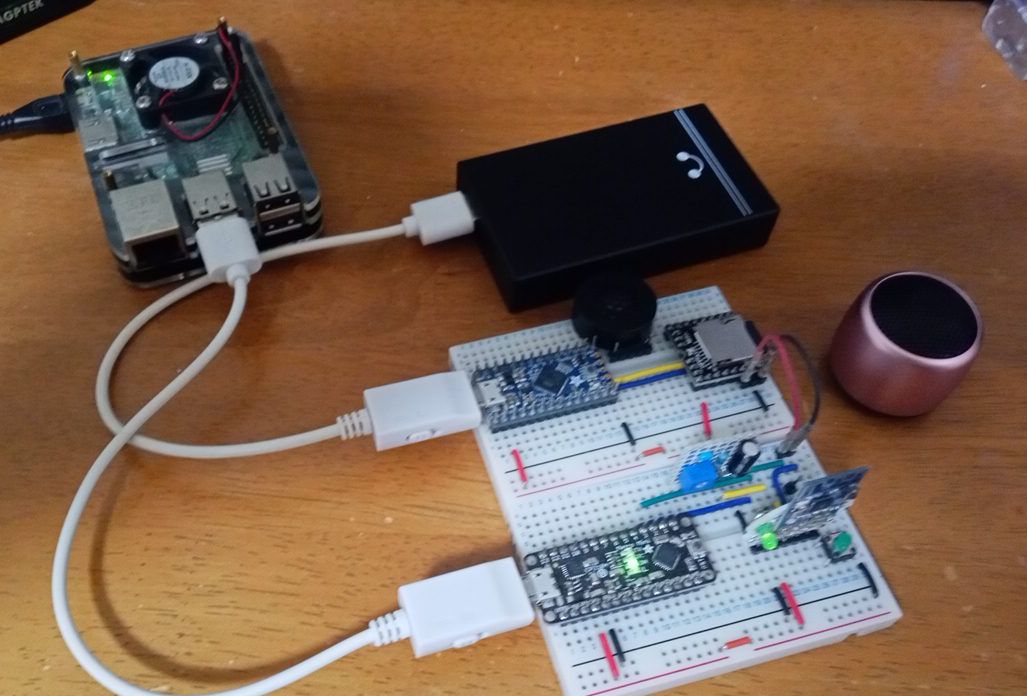
$ pio device monitor -p /dev/ttyUSB0 -b 115200
電源を入れるとデバイスに接続したことがない場合はスキャンが実行されます。
電源を切り、再び電源を入れると、最後に接続していたデバイスに自動的に接続されます。
接続が確立されない場合、自動接続リスト(VMLINK)に登録されたMACアドレスがスキャンされ、見つかったMACアドレスのデバイスに接続されます。
CONボタンを押すと、現在の自動接続リストも削除されます。
外部オーディオ機器からの入力信号のON/OFF制御はありません。
Bluetoothスピーカーと接続後は入力信号の有無に関わらずオーディオ送信されます。
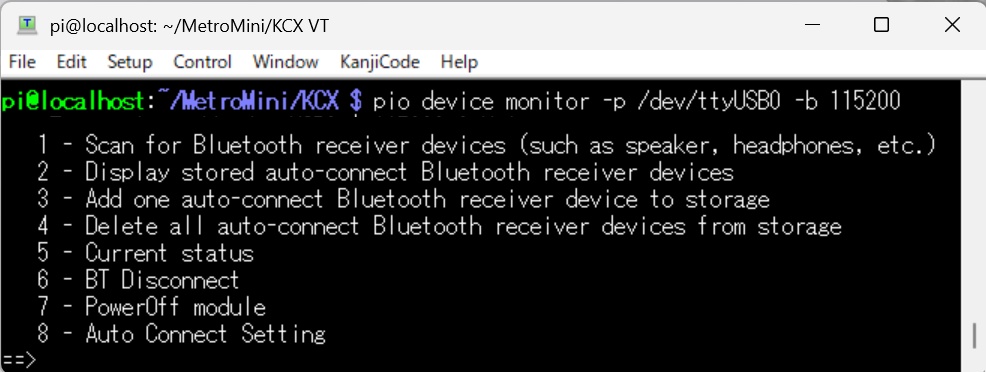
変更したプログラムでは、メニュー番号選択以外にコマンドプロンプトからKCX用のATコマンドを入力できるようにしています。
●Bluetoothスピーカーを検索する際は、1番を選択します
AT+
OK+
AT+RESET
OK+RESET
?VM Reset2
Delete_Vmlink
POWER ON
SCAN....
AT+
OK+
MacAdd:014d0b2d4241,Name:MT
CON ONE
CONNECT=>MacAdd:014d0b2d4240,Name:MT
AT+PAIR
OK+PAIR
※AT+RESETを実行すると、登録済みの自動接続MACアドレスが消去されてしまうので注意が必要です
※検出された16進表記12文字(2文字x6個)の並びはスマホなどで表記されるMACアドレスとは順番が逆転しています
●自動接続用MACアドレスを登録する際は、3番を選択します
Enter the unique MAC address for the Bluetooth speaker or headphones;
it starts with 0x, upper or lower case does not matter;
maximum of 12 characters after the 0x,
To abort adding an auto-connect Bluetooth receiver device to storage, just enter an empty line
==> 014d0b2d4241 ← "0x"を省いて入力します
Your entry "014d0b2d4241" was accepted
Enter the name you choose for this device; it is OK to place spaces between words,
maximum of 20 characters total
To abort adding an auto-connect Bluetooth receiver device to storage, just enter an empty line
==> MT
●8番のAuto Connect Settingは新たに追加した項目です
AT+RESET実行などで登録済の自動接続用MACアドレスを消去してしまった場合に選択します。
ご自身の環境に合わせMACアドレスをソースコード内に追記してください。
下記の例では2個のMACアドレスを登録しています。
AT+
OK+
AT+DISCON
OK+DISCON
SCAN....
MacAdd:0f1939d72316,Name:HW-BT
CON LAST
AT+DELVMLINK
Delete_Vmlink
AT+ADDLINKADD=0f1939d72316
OK+ADDLINKADD=0f1939d72316
BT_ADD_NUM=01
BT_NAME_NUM=00
Auto_link_Add:null
MEM_MacAdd 00:0
AT+ADDLINKNAME=HW-BT
OK+ADDLINKNAME=HW-BT
BT_ADD_NUM=01
BT_NAME_NUM=01
Auto_link_Add:null
MEM_MacAdd 00:0
AT+ADDLINKADD=014d0b2d4241
OK+ADDLINKADD=014d0b2d4241
BT_ADD_NUM=02
BT_NAME_NUM=01
Auto_link_Add:null
MEM_MacAdd 00:0
AT+ADDLINKNAME=MT
OK+ADDLINKNAME=MT
BT_ADD_NUM=02
BT_NAME_NUM=02
Auto_link_Add:null
MEM_MacAdd 00:0
その他の操作の一例です。
==> 2
2=DISPLAY
AT+
OK+
AT+VMLINK?
OK+VMLINK
BT_ADD_NUM=02
BT_NAME_NUM=02
Auto_link_Add:null
MEM_MacAdd 00:0f1939d72316
==> 4
4=DELETE ALL
AT+
OK+
AT+DISCON
OK+DISCON
SCAN....
AT+DELVMLINK
Delete_Vmlink
AT+RESET
OK+RESET
??POWER ON
AT+
OK+
AT+VMLINK?
OK+VMLINK
BT_ADD_NUM=00
BT_NAME_NUM=00
Auto_link_Add:nvll
==> 5
5=STATUS
AT+
OK+
AT+GMR?
OK+VERS:KCX_BT_RTX_V1.4
AT+BAUD?
OK+BAUD=4,BAUD=115200
AT+STATUS?
OK+STATUS:1
==> 6
6=Disconnect
AT+
OK+
AT+DISCON
OK+DISCON
==> 7
7=PowerOff module
SCAN....
MacAdd:014d0b2d4241,Name:MT
CON LAST
AT+
OK+
AT+POWER_OFF
OK+POWEROFF_MODE
|
 Raspberry Pi(ラズベリー パイ)は、ARMプロセッサを搭載したシングルボードコンピュータ。イギリスのラズベリーパイ財団によって開発されている。
Raspberry Pi(ラズベリー パイ)は、ARMプロセッサを搭載したシングルボードコンピュータ。イギリスのラズベリーパイ財団によって開発されている。
 Arduinoで学ぶ組込みシステム入門(第2版)
Arduinoで学ぶ組込みシステム入門(第2版)
●Arduinoを使って組込みシステム開発を理解する
・ハードウェアやソフトウェアなどの基礎知識/
・設計から実装までを系統的に説明するモデルベース開発/
・Arduinoを用いた実際の開発例
 最新 使える! MATLAB 第3版
最新 使える! MATLAB 第3版
◆◆すぐに「使える!」 全ページフルカラー!◆◆
・MATLAB R2022bに対応し、解説もより詳しく!/
・コマンド・スクリプトの例が豊富で、動かして学べる!/
・超基本から解説。これから使いはじめる人にぴったり!/
・全編フルカラー、スクリーンショットも豊富!
 Amazon Web Services基礎からのネットワーク&サーバー構築改訂4版
Amazon Web Services基礎からのネットワーク&サーバー構築改訂4版
1.システム構築をインフラから始めるには/
2.ネットワークを構築する/
3.サーバーを構築する/
4.Webサーバーソフトをインストールする/
5.HTTPの動きを確認する/
6.プライベートサブネットを構築する/
7.NATを構築する/
8.DBを用いたブログシステムの構築/
9.TCP/IPによる通信の仕組みを理解する
 C言語は第二の母国語: 独学学生時代から企業内IT職人時代に培った、独立のための技術とノウハウ 平田豊著
C言語は第二の母国語: 独学学生時代から企業内IT職人時代に培った、独立のための技術とノウハウ 平田豊著
学生時代から独学でプログラミングをはじめ、企業内でデバイスドライバを開発し、そして独立後もたくさんのアプリケーション開発や技術書制作に携わってきた著者。その筆者が大事に使い続ける「C言語」の“昔と今”について、気づいたことや役立つ知識、使ってきたツールなどについて、これまで記してきたことを整理してまとめました。
本書では、現役プログラマーだけでなく、これからプログラミングを学ぶ学生などにも有益な情報やノウハウを、筆者の経験を元に紹介しています。
 1冊ですべて身につくJavaScript入門講座
1冊ですべて身につくJavaScript入門講座
・最初の一歩が踏み出せる! 初心者に寄り添うやさしい解説
・最新の技術が身につく! 今のJavaScriptの書き方・使い方
・絶対に知っておきたい! アニメーションとイベントの知識
・プログラミングの基本から実装方法まですべて学べる
 図解! Git & GitHubのツボとコツがゼッタイにわかる本
図解! Git & GitHubのツボとコツがゼッタイにわかる本
ソフトウェア開発では欠かすことのできないGit、GitHub。
これからGit、GitHubを使いたいという入門者の方でも、実際に手を動かしながら使い方を学べます。
 C自作の鉄則!2023 (日経BPパソコンベストムック)
C自作の鉄則!2023 (日経BPパソコンベストムック)
メーカー製のパソコンはスペックが中途半端で、自分が本当に欲しい機種がない――。そう思っている人には、ぜひ自作パソコンをお薦めします。自作パソコンのパーツは進化が速く、しかも驚くほど種類が豊富。価格も性能も、幅広く用意されているため、満足度100%の“自分だけの1台”を手に入れることができます。
 Interface 2023年6月号
Interface 2023年6月号
特集:第1部 フィルタ設計 基礎の基礎/
第2部 係数アプリや波形観測アプリで合点!FIR&IIRフィルタ作り/
第3部 配布プリント基板で体験!マイコンで動くフィルタ作り
 日経Linux 2023年5月号
日経Linux 2023年5月号
【特集 1】 AI時代の最強フリーソフト ~ 25のやりたいを実現!
【特集 2】 AWS、Azureのうまみを無料で体感!面倒なことはクラウドに任せよう
【特集 3】 新しいRaspberry Pi Cameraで遊んでみよう
【特集 4】 Linuxで旧型PCを復活! 1kg切るモバイルPCを「ChromeOS Flex」でChromebook化
 ラズパイマガジン2022年秋号
ラズパイマガジン2022年秋号
特集:5大人気ボード 電子工作超入門
「半導体不足で在庫が不足し、電子工作のボードがなかなか買えない…」。そんな今にふさわしい特集を企画しました。5種の人気ボードにすべて対応した電子工作の入門特集です。「GPIO」や「I2C」を使った電子パーツの制御方法は、どのボードでも同じです。手に入れられたボードを使って、今こそ電子工作を始めましょう。
 地方で稼ぐ! ITエンジニアのすすめ
地方で稼ぐ! ITエンジニアのすすめ
学歴、理系の知識、専門スキル……全部なくてもITエンジニアになれる!
地方でも高収入でやりがいをもって働ける!ITエンジニアの魅力を一挙大公開
 Raspberry Piのはじめ方2022
Raspberry Piのはじめ方2022
本書は、ラズパイやPicoの買い方やインストール、初期設定といった基本から、サーバー、電子工作、IoT、AIといったラズパイならではの活用方法まで、1冊でお届けします。
ラズパイをこれから始める方向けに、全36ページの入門マンガ「女子高生とラズベリーパイ」も巻末に掲載。これを読むだけでラズパイがどんなものなのか、すぐに分かって触れるようになります。
 ハッカーの学校 IoTハッキングの教科書
ハッカーの学校 IoTハッキングの教科書
生活にとけこみ、家電機器を便利にするIoT技術。
Webカメラなど、便利の裏側に潜むセキュリティの危険性をハッキングで検証。
専門家がパケットキャプチャからハードウェアハッキングまで、その攻撃と防御を徹底解説。
本書は2018年7月に刊行された「ハッカーの学校IoTハッキングの教科書」に一部修正を加えた第2版です。
 攻撃手法を学んで防御せよ! 押さえておくべきIoTハッキング
攻撃手法を学んで防御せよ! 押さえておくべきIoTハッキング
本書は、経済産業省から2021年4月にリリースされた、IoTセキュリティを対象とした『機器のサイバーセキュリティ確保のためのセキュリティ検証の手引き』の『別冊2 機器メーカに向けた脅威分析及びセキュリティ検証の解説書』をもとに、IoT機器の開発者や品質保証の担当者が、攻撃者の視点に立ってセキュリティ検証を実践するための手法を、事例とともに詳細に解説しました。
 ポチらせる文章術
ポチらせる文章術
販売サイト・ネット広告・メルマガ・ブログ・ホームページ・SNS…
全WEB媒体で効果バツグン!
カリスマコピーライターが教える「見てもらう」「買ってもらう」「共感してもらう」すべてに効くネット文章術
 プログラマーは世界をどう見ているのか 西村博之著
プログラマーは世界をどう見ているのか 西村博之著
イーロン・マスク(テスラ)、ジェフ・べゾス(Amazon)、ラリー・ペイジ(Google)…etc.
世界のトップはなぜプログラマーなのか?
 ニーア オートマタ PLAY ARTS改 <ヨルハ 二号 B型 DX版> PVC製 塗装済み可動フィギュア
ニーア オートマタ PLAY ARTS改 <ヨルハ 二号 B型 DX版> PVC製 塗装済み可動フィギュア
「NieR:Automata」より、ヨルハ二号B型こと2BがPLAY ARTS改に新たに登場!
高級感の感じられるコスチュームや髪の質感、洗練されたボディバランス、細かなデティールに至るまでこだわり抜かれた逸品。
DX版には通常版のラインナップに加え2Bの随行支援ユニット ポッド042などをはじめ“純白の美しい太刀"白の約定やエフェクトパーツ、自爆モードを再現できる換装用ボディパーツ、シーンに合わせて変えられる顔パーツ2種も付属する豪華な仕様に。
作中のあらゆるシーンを再現することが可能なファン必見の一品となっている。
 Newtonライト2.0 ベイズ統計
Newtonライト2.0 ベイズ統計
ベイズ統計は,結果から原因を推定する統計学です。AIや医療などの幅広い分野で応用されています。その基礎となるのは18世紀に考えだされた「ベイズの定理」です。
この本では,ベイズ統計学のきほんをやさしく紹介していきます。
 白光(HAKKO) ダイヤル式温度制御はんだ吸取器 ハンディタイプ FR301-81
白光(HAKKO) ダイヤル式温度制御はんだ吸取器 ハンディタイプ FR301-81
 無水エタノールP 500mlx2個パック(掃除)
無水エタノールP 500mlx2個パック(掃除)
 ケイバ(KEIBA) マイクロニッパー MN-A04
ケイバ(KEIBA) マイクロニッパー MN-A04
 サンハヤト SAD-101 ニューブレッドボード
サンハヤト SAD-101 ニューブレッドボード
 白光(HAKKO) HEXSOL 巻はんだ 精密プリント基板用 150g FS402-02
白光(HAKKO) HEXSOL 巻はんだ 精密プリント基板用 150g FS402-02
 [Amazon限定ブランド]【指定第2類医薬品】PHARMA CHOICE 解熱鎮痛薬 解熱鎮痛錠IP 100錠
[Amazon限定ブランド]【指定第2類医薬品】PHARMA CHOICE 解熱鎮痛薬 解熱鎮痛錠IP 100錠
|